
La mauvaise saison arrivant, il est temps de construire…
Avec plusieurs pilotes du Club, nous préparons des drones de course pour faire le show façon course aux pylônes…
On a fixé la taille de 250, mais pour le reste chacun fait comme il veut.
Je suis parti sur une version 100% chinoise avec du matériel HobbyKing sélectionné pour chercher la performance…
Ci-dessous, la liste des courses :
KK2.0 Super Bright Status and Alarm LED (6.23 €)
5030 Carbon Fiber Propellers CW and CCW Rotation (2 paires) (7.74 €)
Hobbyking KK2.1.5 Multi-rotor LCD Flight Control Board With 6050MPU And Atmel 644PA (17.93 €)
Multistar Elite 2204-2300KV Multi-Rotor Motor (CW Prop Adapter) (Quantité 2) (24.94 €)
Multistar Elite 2204-2300KV Multi-Rotor Motor (CCW Prop Adapter) (Quantité 2) (24.94 €)
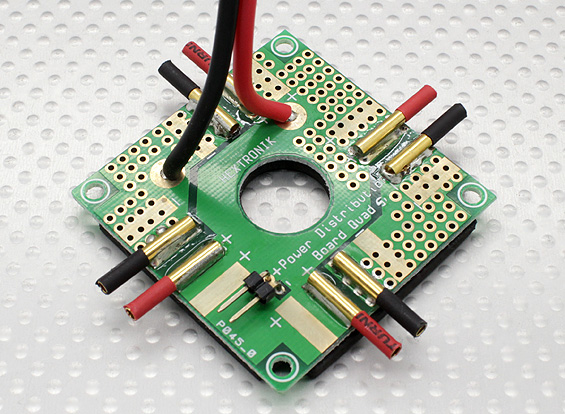
Hobby King Quadcopter Power Distribution Board Lite (2.88 €)
10CM Male to Male Servo Lead (JR) 26AWG (10pcs/set) (3.12 €)
Afro Slim 20Amp Multi-rotor Motor Speed Controller (SimonK Firmware) (Quantité 4) (42.44 €)
TURNIGY 3A UBEC w/ Noise Reduction (3.45 €)
FPV250LH Low Hung Clean-and-Dirty (KIT) (15.59 €)
ZIPPY Compact 1300mAh 3S 25C Lipo Pack (6.98 €)
Soit un total sans le port et sans récepteur : 156.24 €
Après les courses, et la livraison, il faut attaquer le montage.
Globalement, le châssis plastique est facile à monter. Vous pouvez choisir de monter ou pas la partie rectangulaire centrale.
Pour ma part j’ai fait le choix de ne conserver que les extensions plates qui viennent allonger le châssis. (recherche de gain de poids)
J’ai fait le choix d’acheter un contrôleur de vol Hobbyking KK 2.1.5 pour son prix et la facilité de mise en œuvre (même si la documentation est inexistante à la livraison).
On va pouvoir parler maintenant du matériel reçu…
Pour les moteurs, rien à dire c’est fait pour. (Maj : après quelques vols, je constate que ça tient vraiment la route. Très puissant et résistant)
Passons à la partie ESC (controleur électrique des moteurs), ceux choisis dans la liste sont OPTO, c’est à dire qu’ils ont 2 fils au lieu de trois au niveau de la prise servo, ils n’alimentent pas en 5v par le fil rouge du milieu. Il va vous falloir un UBEC pour convertir la tension 12v de la lipo de propulsion en 5V pour alimenter le contrôleur de vol du drone.
NB : J’ai choisi ces contrôleurs de vol, car ils sont équipés du firmware SIMONK particulièrement adapté à l’utilisation en drone car beaucoup plus réactif qu’un contrôleur électrique classique. (pour info : un comparatif entre un contrôleur normal et un SIMONK)

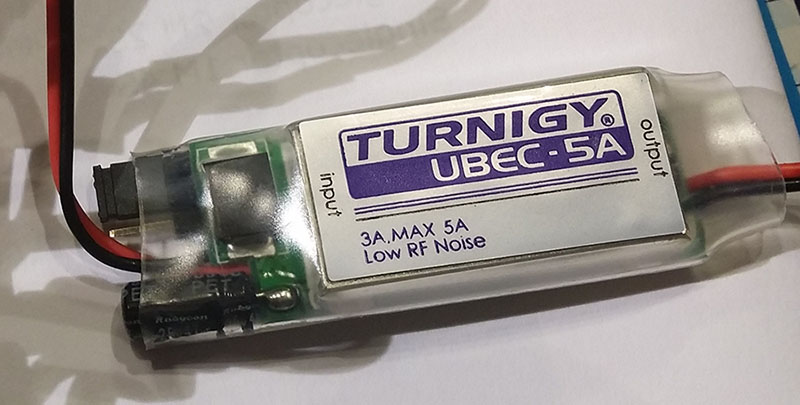

Bien vérifier sur le UBEC, que le cavalier est sur la position 5v.
Passons au montage du drone.
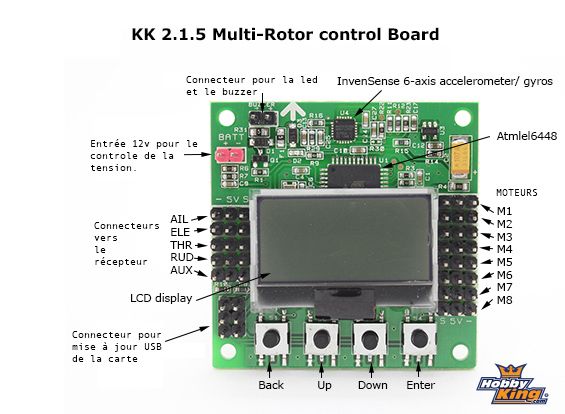
Une fois que vous avez monté le châssis, vous devez fixer le contrôleur de vol au centre. Attention il y a un sens :
L’écran doit être dans le sens de l’avant du drone. (C’est important)
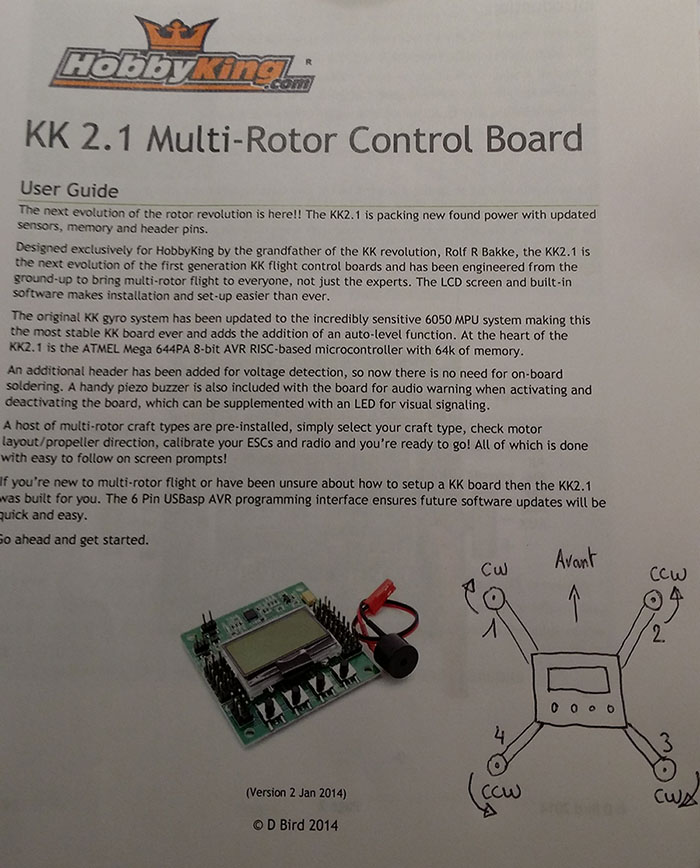
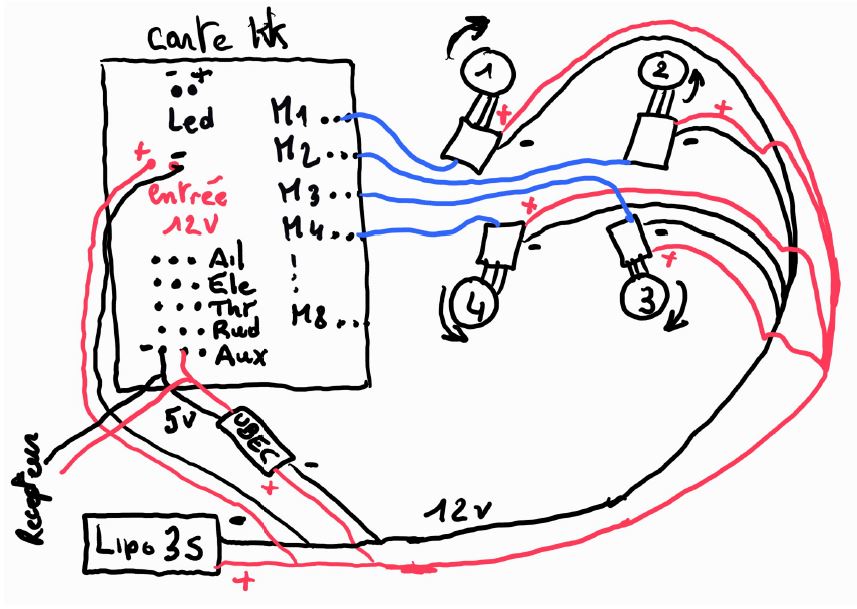
Je profite du schéma pour vous indiquer le sens de rotation des moteurs, les numéros des moteurs pour une configuration quadricoptère.
La batterie Lipo 3S doit alimenter en 12v les 4 contrôleurs des moteurs (les fils rouge et noir avec la prise dorée), soit vous soudez les fils entre eux, soit vous utilisez la carte « Power distribution board »
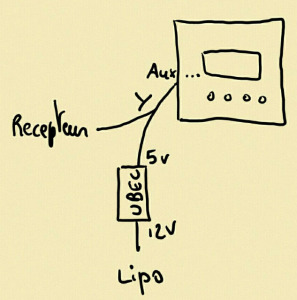
Egalement, vous devez prévoir une connexion directe 12v pour aller vers la prise rose du contrôleur de vol (en haut à gauche du schéma ci-dessous). Cela permet au contrôleur de vol de savoir le voltage de la lipo et de vous prévenir quand la batterie devient faible.
Et pour finir, comme nous avons utilisez des contrôleurs électriques OPTO, il faut prévoir une alimentation 12v pour l’entrée du UBEC (qui transformera en 5V à la sortie pour alimenter la carte contrôleur de vol).
Prévoir un Y sur la connexion AUX servo sur la carte contrôleur de vol, afin de l’alimenter en 5V (sur le Y, la connexion 5V venant du UBEC, et la connexion vers la voie AUX du récepteur)
Normalement, si vous avez été bon 😉
Ca n’a pas fumé, et le contrôleur de vol affiche :
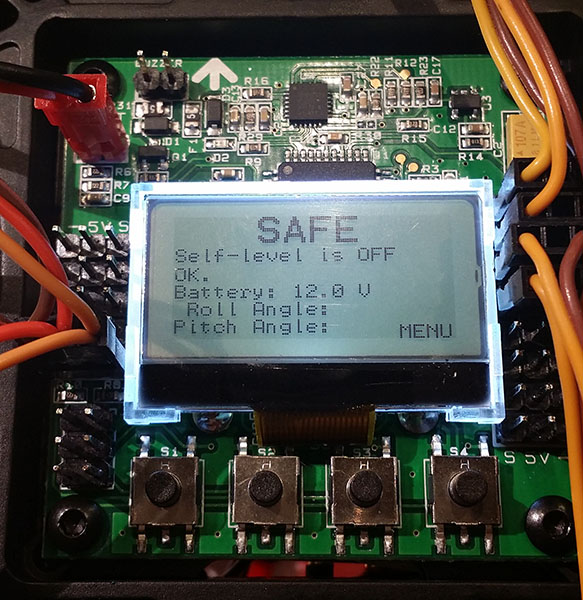
Vous pouvez voir :
1) Que c’est allumé 😉 .. C’est déja pas mal
2) Que le contrôleur affiche Battery : le voltage de votre lipo
La on est bon pour la suite…
On attaque le paramétrage du contrôleur de vol
Déjà on commence par faire un reset du contrôleur pour partir au propre :
Bouton (à droite) : Menu, et vous descendez avec les boutons UP / DOWN pour aller sur la ligne FACTORY RESET et vous appuyez sur ENTER.
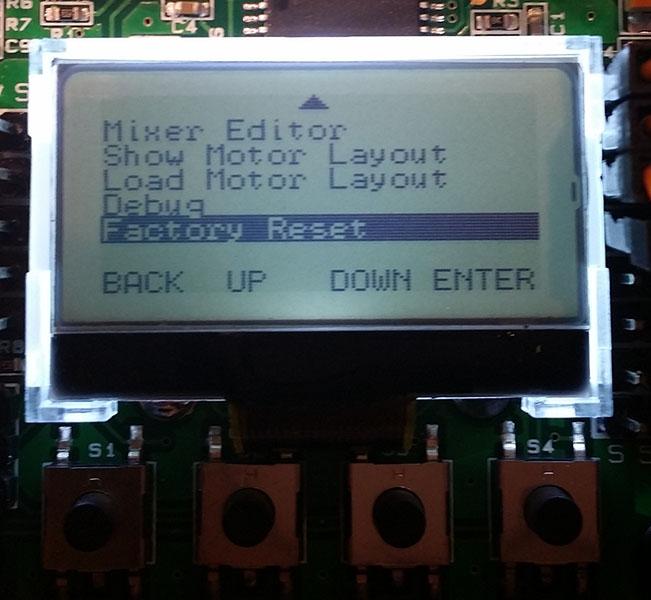
Voila on part au propre avec les réglages usine.
Maintenant vous mettez le drone sur une surface plane et bien horizontale.
Car on va calibrer les gyroscopes qui servent pour la stabilisation en vol, donc on pose pas le drone à l’arrache au milieu des outils et du bordel sur l’établie 😉
Vous allez sur la ligne ACC CALIBRATION, et vous appuyez sur ENTER.
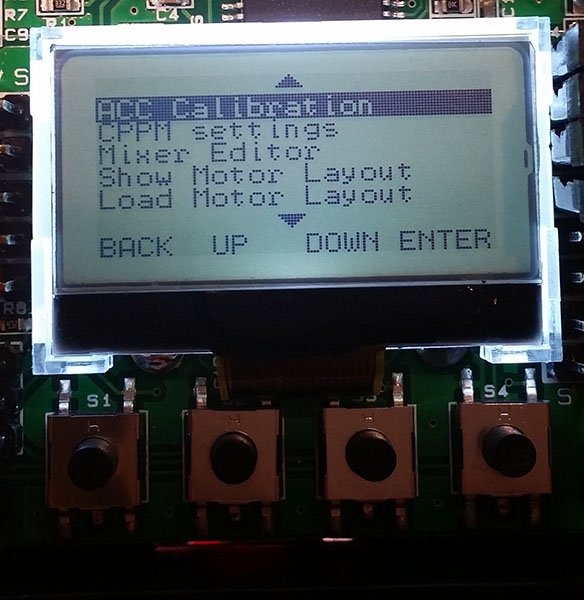
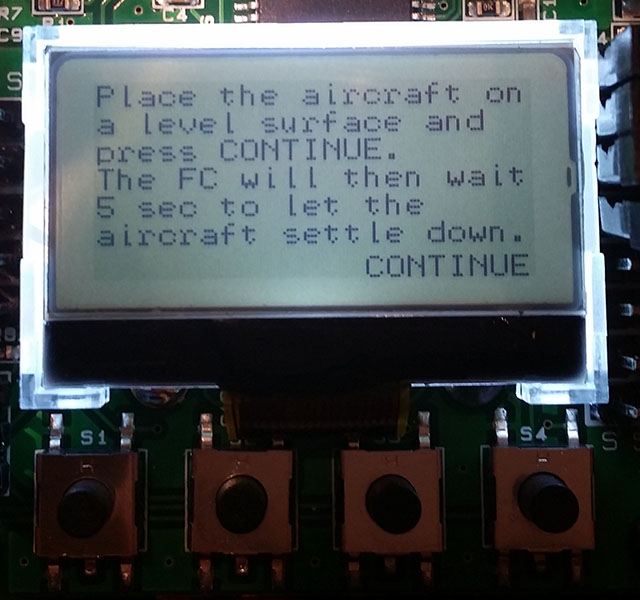

Vous appuyez sur CONTINUE à chaque fois.
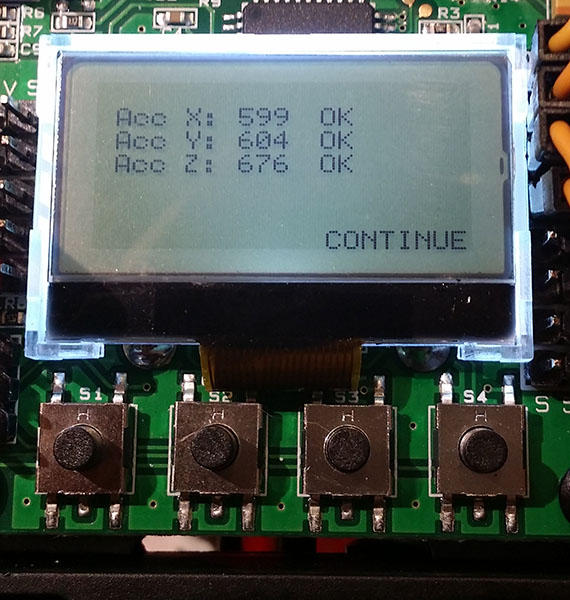
Normalement c’est bon, le contrôleur de vol est calibré à l’horizontal.
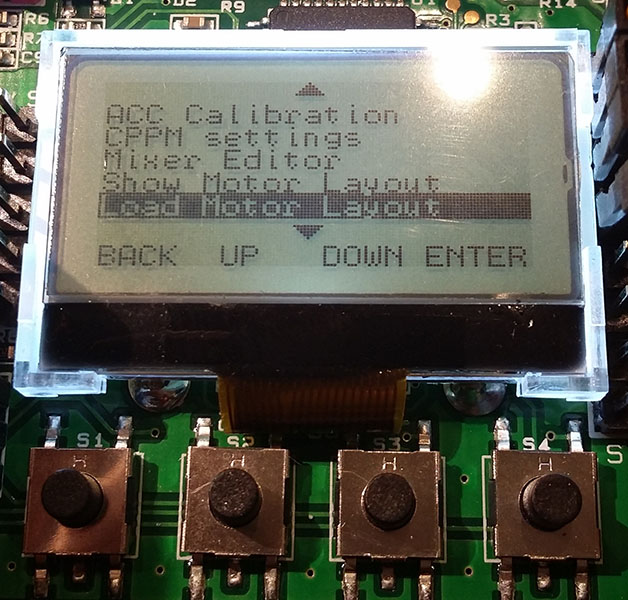
C’est maintenant le moment de dire au contrôleur de vol ce qu’on a comme drone
Dans notre cas, c’est un classique Quadricoptère en X
Vous allez sur la ligne LOAD MOTOR LAYOUT, et vous appuyez sur ENTER.
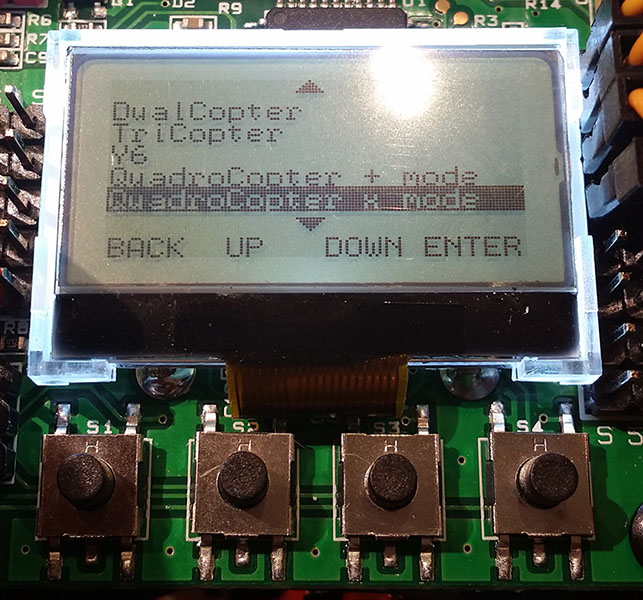
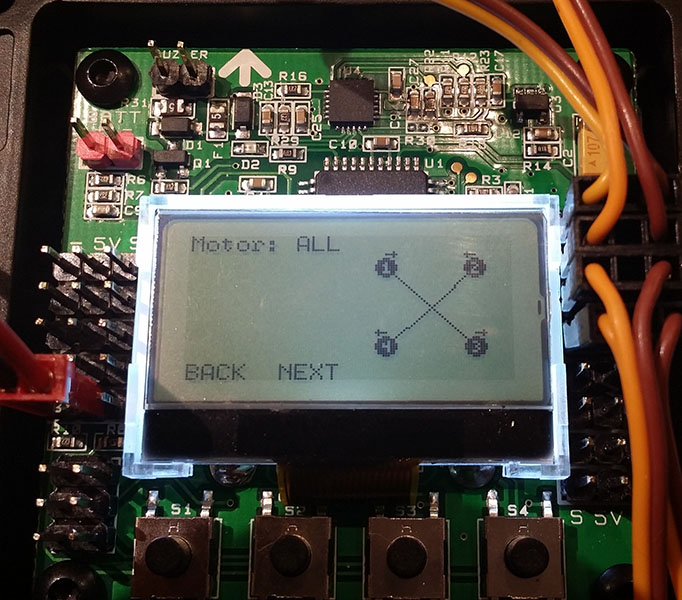
Vous pouvez voir sur l’écran le numéro des moteurs, avec le sens de rotation des hélices. (C’est important pour la suite).
Il reste à programmer la voie AUX afin d’avoir un bouton sur la télécommande qui permettra de choisir de voler avec une assistance stabilisation active ou pas (mode manuel pour faire des loopings 😉 )
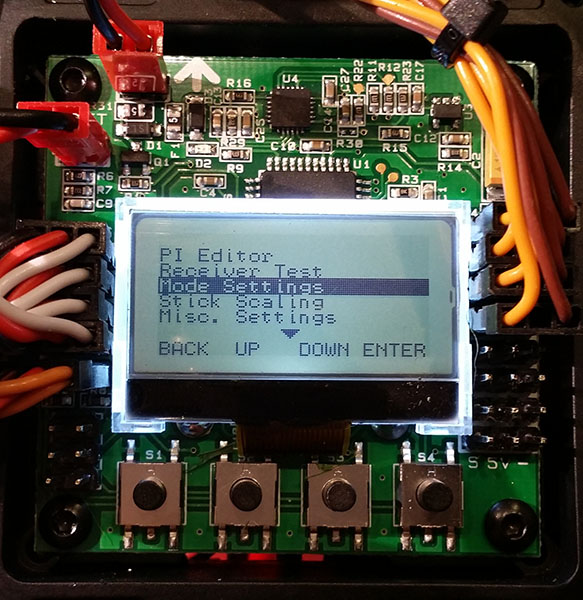
Vous allez sur la ligne MODE SETTINGS, et vous appuyez sur ENTER.
Vous appuyez ensuite sur ENTER pour afficher le mode AUX, et vérifiez en même temps que les autres paramètres sont comme sur la photo.
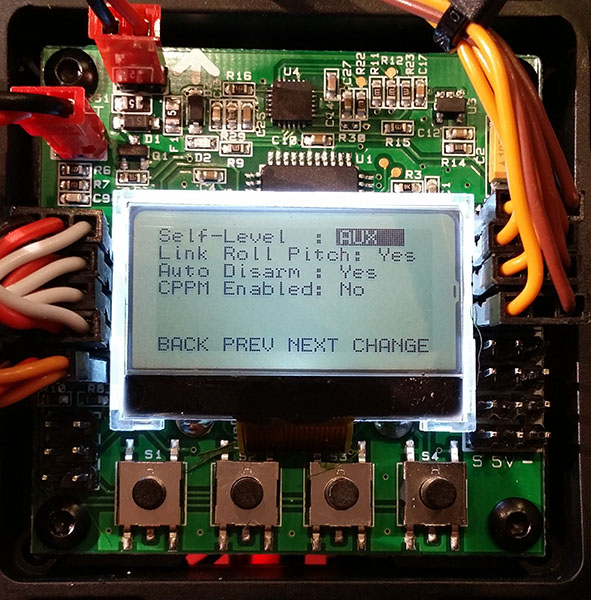
Vous faites BACK, c’est bon, le contrôleur de vol est configuré.
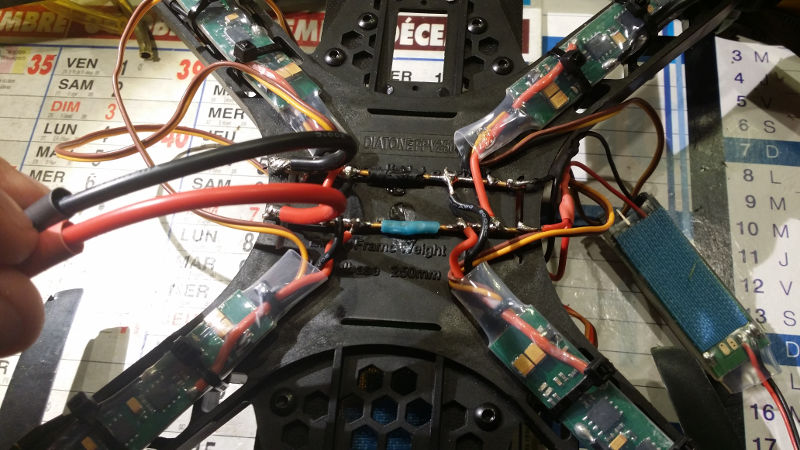
Sur cette dernière photo vous voyez à droite les 4 connexions des contrôleurs électriques des moteurs 1 à 4 du drone.
Faites pareil et ne vous trompez pas dans la connexion…
le moteur 1 sur la connexion 1, etc…
Sur la gauche en haut : vous voyez l’arrivée 12v qui vient de la batterie Lipo 3S
Sur la gauche en bas : vous voyez le Y avec la connexion 5v du UBEC, et la prise AUX qui va au récepteur.
Il faut maintenant connecter le récepteur sur le contrôleur de vol
Sur FUTABA, j’ai fait la connexion suivante :
AIL vers la voie 1
ELE vers la voie 2
THR vers la voie 3
RUD vers la voie 4
AUX vers la voie 7
Avec une autre marque, débrouillez vous pour respecter les standards de la radio.
AIL (Ailerons), ELE (profondeur), THR (Gaz), RUD (Dérives), AUX (bah… c’est AUX  )
)
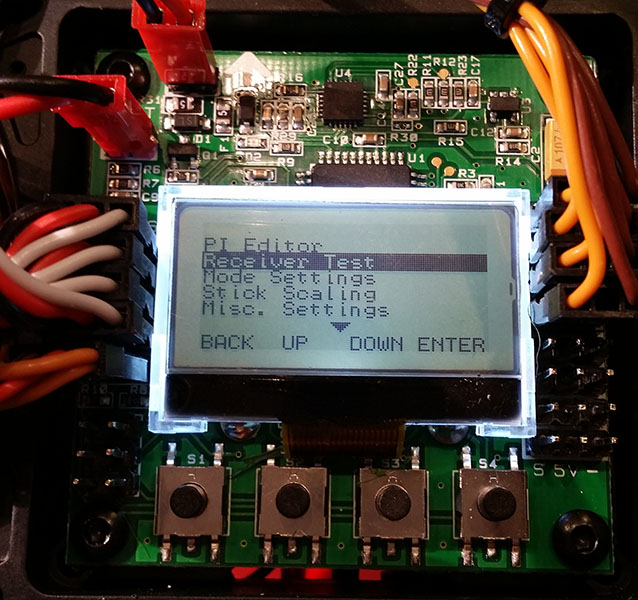
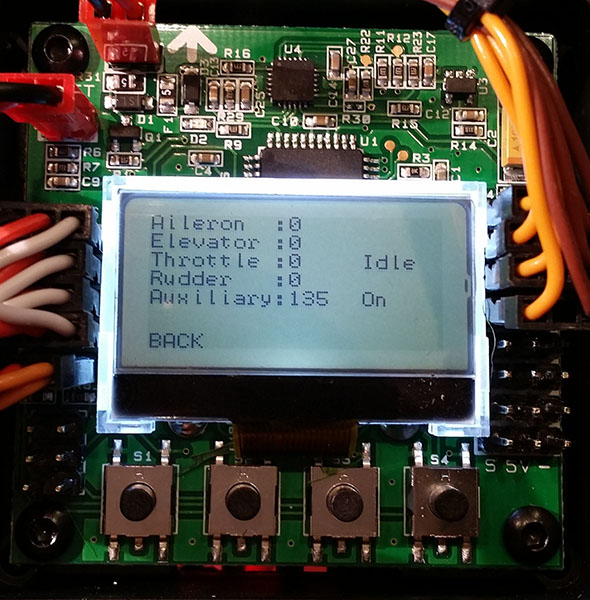
Une fois la connexion effectué sur les voies et la voie AUX attribuée à un bouton 2 positions, il faut aller dans le menu du contrôleur de vol à la ligne RECEIVER TEST, et vous appuyez sur ENTER.
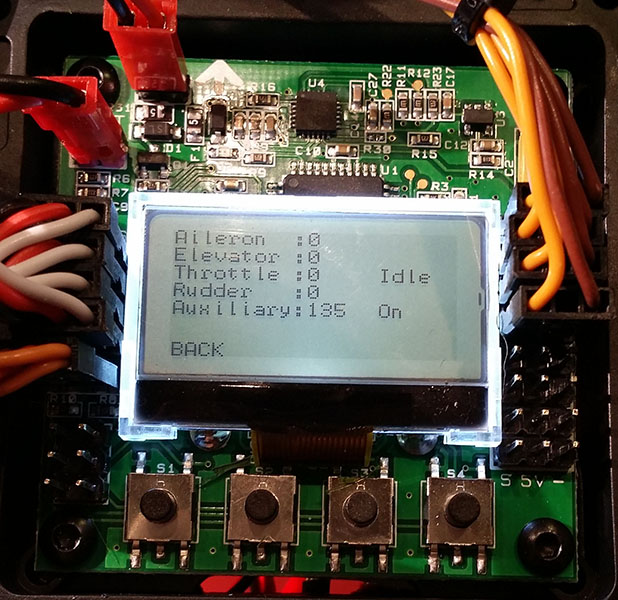
Avant de commencer tout paramétrage, vous devez être au neutre entre la télécommande et le contrôleur de vol.
Votre contrôleur de vol doit être à zéro comme la photo ci-dessous. Si ce n’est pas le cas, vous devez jouer avec vos Subtrim sur la télécommande pour que toute les voies soit à zéro (sauf le bouton aux).
Nous allons maintenant tester votre configuration voie par voie.
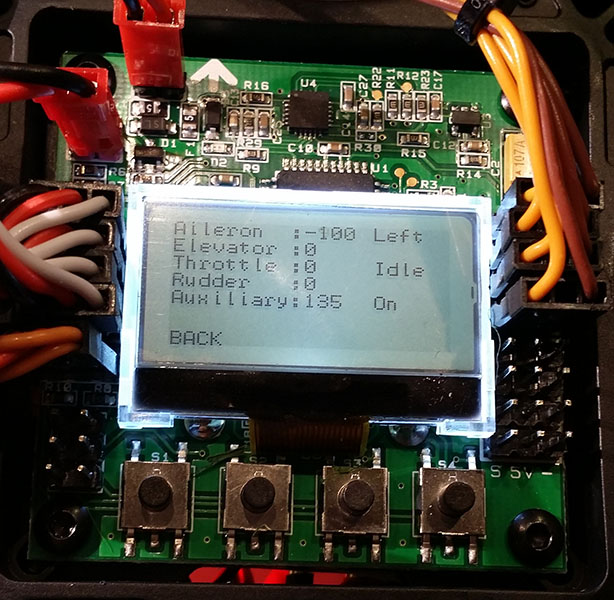
Sur votre radio, bougez les ailerons à GAUCHE, normalement l’écran affiche LEFT à coter de AILERON.
Puis à droite, normalement l’écran affiche RIGHT à coter de AILERON

Si c’est inversé, à vous de paramétrer la fonction reverse sur votre radio pour la voie AILERON.
Vous faites les mêmes tests pour toutes les voies… (Je vais pas tout faire non plus 😉 )
Testez aussi le fonctionnement du bouton affecté à la voie AUX
Dans notre exemple, mon bouton est configuré sur ON (on voit Auxiliary : 135 ON), donc le drone à la stabilisation d’activée.
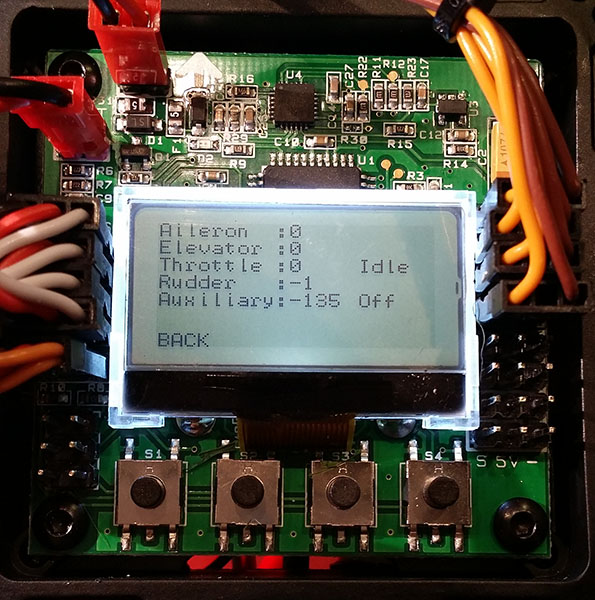
Je change la position du bouton sur la télécommande sur OFF et ca passe sur l’écran en OFF
A ce niveau si tout est comme j’ai dit… CA VA VOLER
Maintenant on peaufine les réglages avant d’aller voler…
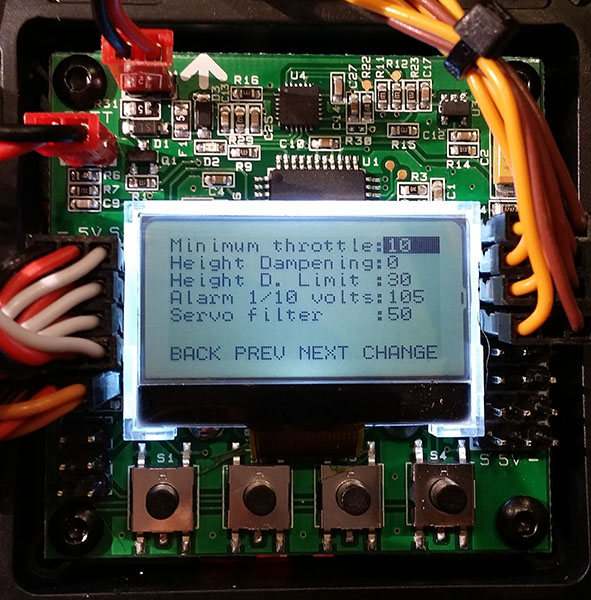
Vous allez sur la ligne MISC. SETTINGS, et vous appuyez sur ENTER.
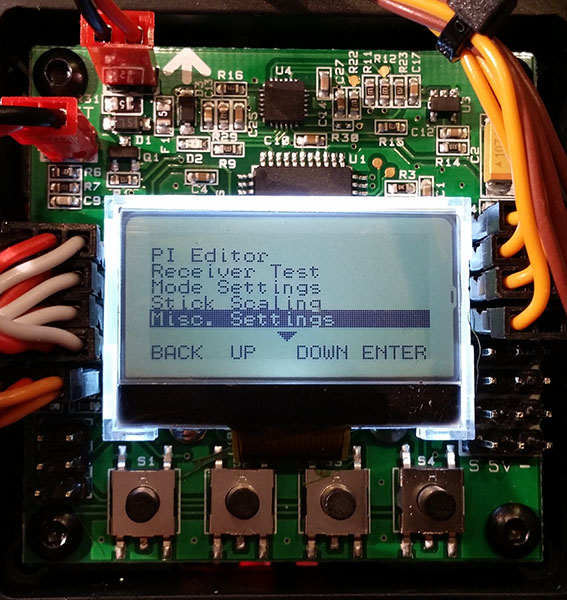
Puis vous allez modifier le paramètre ALARM 1/10 VOLTS :
Alarme sur lipo faible et vous entrez 105 pour 10,5v, le buzzer va sonner, et la led clignoter quand vous serez en alarme batterie.
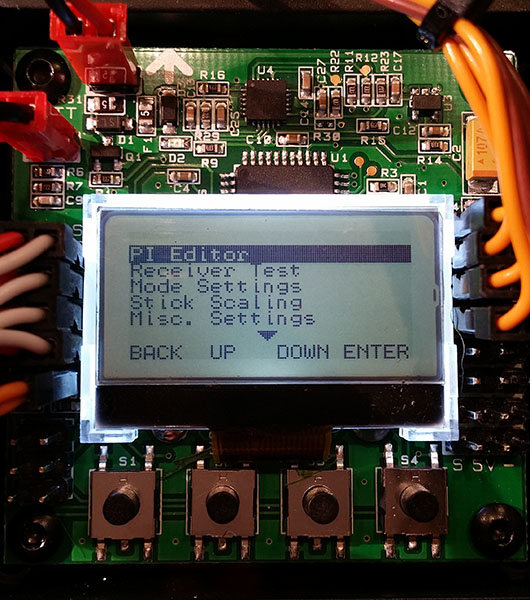
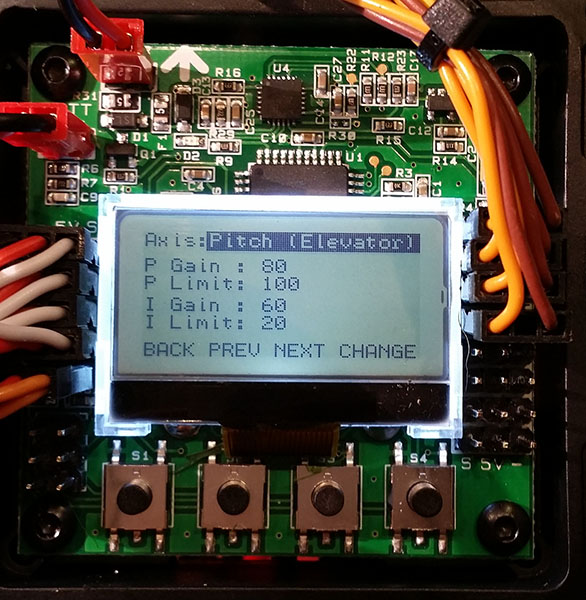
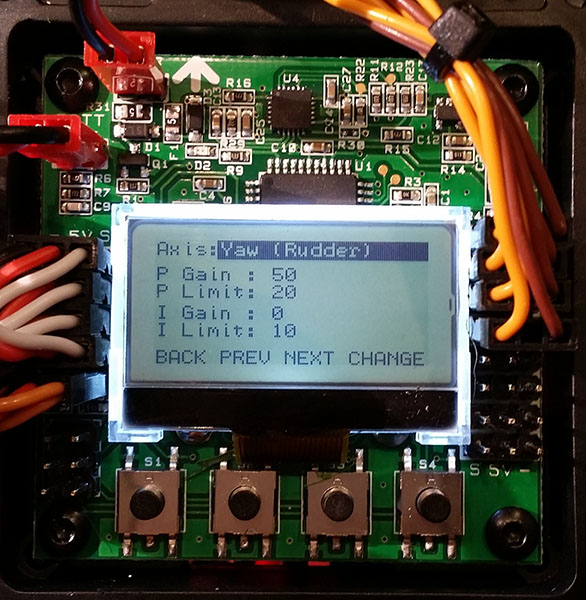
On va maintenant mettre des réglages optimisés (par rapport à notre configuration) pour le contrôleur de vol.
Vous allez sur la ligne PI EDITOR, et vous appuyez sur ENTER.
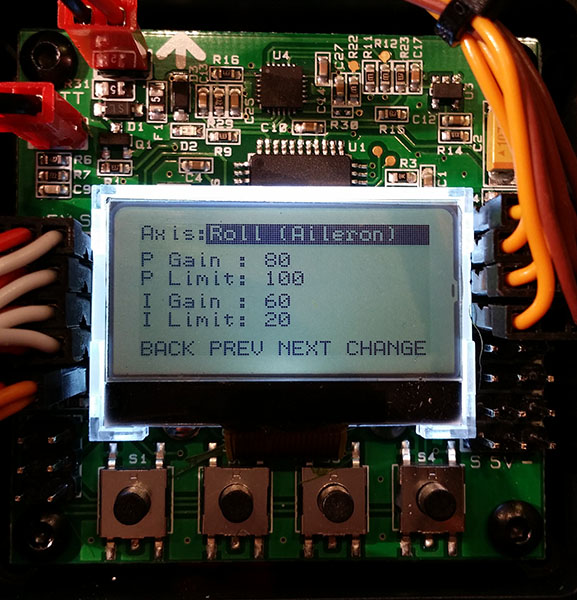
Après quelques vols, j’ai mis les valeurs ci-dessus.
Au départ vous pouvez mettre :
P GAIN = 30
P LIMIT = 100
I GAIN = 0
I LIMIT = 20
Après quelques vols, j’ai mis les valeurs ci-dessus.
Au départ vous pouvez mettre :
P GAIN = 30
P LIMIT = 100
I GAIN = 0
I LIMIT = 20
Vous faites BACK.
C’est bon vous pouvez maintenant monter vos hélices en respectant le plan plus haut.
Hélice R sur le moteur 1, et 3
Hélice classique sur le moteur 2 et 4
Testez le sens de rotation pour chaque moteur. Si le moteur ne tourne pas dans le sens indiqué sur le plan, vous devez inverser 2 fils sur les 3 du moteur.
C’est fini, faut aller voler
Quand vous branchez la lipo, le contrôleur de vol s’allume et affiche SAFE (il est en sécurité).
Au passage vérifiez bien que vous décollez en mode stabilisé, sinon c’est le crash assuré pour les débutants…
SELF-LEVEL IS ON (vérifier la position du bouton sur la radio)

Pour activer le drone et décoller vous devez mettre les manches de la radio pendant 3 secondes comme ci dessous :
Pour mettre en drone en mode sécurité à l’atterrissage, vous devez mettre les manches de la radio pendant 3 secondes comme ci dessous :
PS : Désolé pour le dessin de la radio, j’ai fait comme j’ai pu
A vous de jouer et attention aux doigts avec les hélices 😉
Voila le premier vol du drone avec 30 km/h de vent.
Modification et amélioration du drone après utilisation.
J’ai démonté la carte de distribution qui était trop grosse dans ma configuration. Afin de réduire la quantité de fil trop long j’ai opté pour la fabrication d’une distribution d’énergie à partir de 2 fils en cuivre dur (ceux d’électricité 220v).
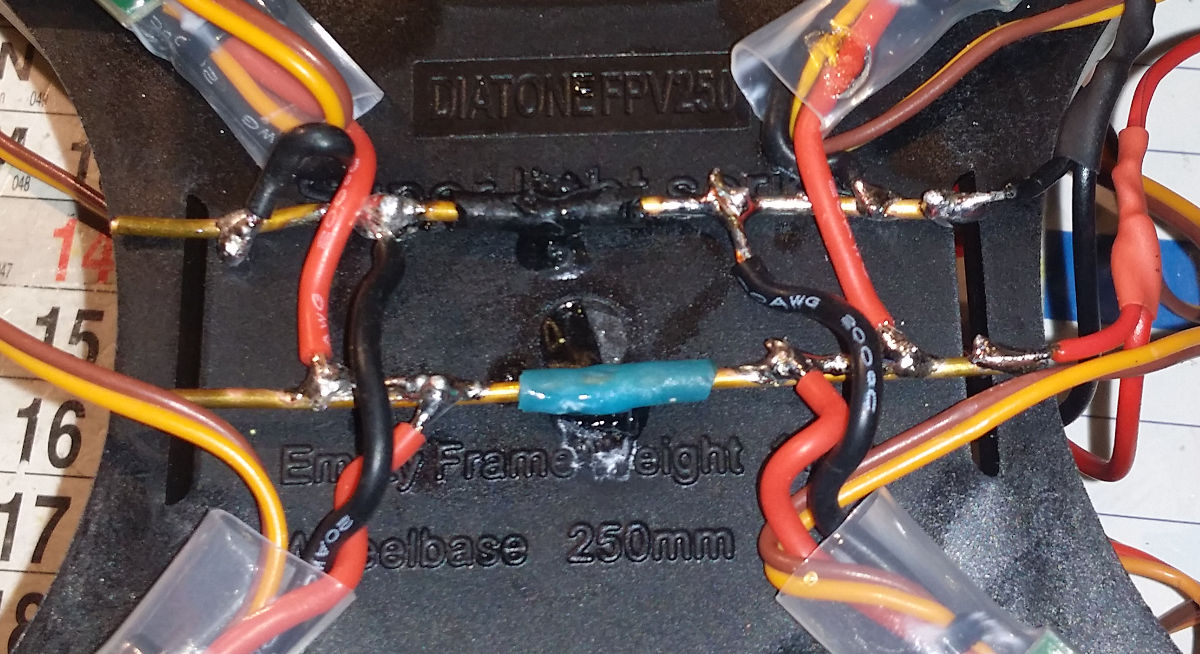
Le – est sur le fil de cuivre du haut, et le + sur le fil de cuivre du bas.
J’ai ensuite isolé l’ensemble avec de la gaine thermo et dans de la résine époxy au centre pour fixer les fils.
Par dessus j’ai fixé le UBEC qui a la bonne dimension pour passer entre les 4 contrôleurs électriques.
On verra ce que ca donne à l’usage mais faut optimisé l’espace…
Suite à une demande dans un commentaire, j’ai rajouté un petit schéma de connexion sur la carte KK.
Alors ? Comment est ce Drone ?
Il à l’air chaud à piloter ? Beaucoup de vent samedi ?
Bravo Amigo.
Bises
Olivier.
Salut Olivier,

effectivement c’est chaud à piloter car le contrôleur de vol ne gère que l’assiette.
Donc ca dérive avec le vent, et quand tu le perds des yeux, il n’y a pas de fonction pour qu’il revienne tout seul
Mais c’est sympa au moins on pilote pour de bon
Le premier vol à eu lieu samedi par 30 km/h de vent. Le petit 250 luttait face au vent mais finalement ca tient le coup.
Biz
Yann
Hello
j’ai commandé cette config chez HK
on verra bien j’en ai eu pour 158 Euros
par contre j’ai lu que la KK2 n’etait pas terrible pour cette taille
on préconise plutot la Naze 32
avez vous d’autre video de vole?
Merci
Bonjour Didier,
J’ai volé une dizaine de fois avec le drone en configuration KK, c’est très bien surtout avec les réglages des photos (les derniers).
Par contre, effectivement, ca n’a rien à voir avec une configuration NAZA + GPS (même le lite à 129 euros).
En configuration KK, pas de retour à la maison, de gestion du failsafe, ni de gestion de l’orientation…
En configuration KK il faut faire attention à ne pas perdre le drone de vue sinon c’est le crash ou la perte de la machine.
Mais bon pour 19 euros la carte controleur de vol, il ne faut pas trop en demander 😉
Depuis je vole en NAZA avec l’hexacoptère de l’autre article. J’ai revendu le 250 à un copain qui vole en KK en attendant de passer en NAZA Lite.
++
Yann
Bonjour Yann,
je n’ai pas bien compris à quoi doit être relier la prise alim 12v (rouge) de la carte KK.
Pourriez-vous m’expliquer s’il vous plaît ?
Merci d’avance
Nicolas
Bonsoir Nicolas,
Il y a une prise en entrée 12v sur la carte KK (la prise rose ou rouge). Cette prise sert à monitorer le voltage de la batterie Lipo 3s du drone afin d’indiquer au moyen du buzzer ou d’un led, quand la batterie est déchargée. Il faut donc brancher une dérivation à partir de la batterie Lipo vers cette entrée sur la carte KK.
Au pire si vous ne comprenez pas bien à quoi ca sert vous ne branchez pas cette prise c’est pas grave ;).
Bon courage
Yann
Re bonsoir Yann,
Merci pour votre réponse rapide. Je désire l’utiliser avec le buzzer et l’avertisseur les.
Est-ce que je peux donc relier la « power distribution bord » (on voit sur la photo deux pics) à l’aide d’un câbles JST directement à l’entrée 12v de la KK ?
Nicolas
Bonjour Nicolas,
c’est exactement ça, si vous utilisez une power distribution board, il suffit juste de connecter un câble JST à partir des 2 pins + et – vers le connecteur rose (entrée 12v) de la carte contrôleur KK.
PS : Faire très attention avec la connexion 12v sur la carte KK. Il ne faut surtout pas brancher l’arrivée 12v par erreur sur la prise buzzer/led (il n’y a pas de détrompeur) car sinon vous cramez tout. (C’est arrivé à un copain à moi…)
++
Yann
salut,
belles explications.
perso, je me suis monté un quad avec les pièces que j’avais en stock plus achat …KK215 + display séparé. ça vole, heureux… faut juste pouvoir comprendre les paramétrages KK2.
ensuite je suis lancé achat de pièces pour monter mon 250 en pièces détachées:130.00€ chez myrcmart pour le même kit de montage à 90.00€.
ben oui en pièces détachées toujours plus chère c’est connu,lol.
il faut rajouter un récepteur et une batterie(1500 ou 2200 en 3s) et ça vole pour se faire plaisir.juste réglages de base (google est mon ami)
kk215 ok et je suis en test pour la CC3D et une programmation de base, via pc facile et agréable.
je vole, ça tient l’air et je me fais plaisir. reste système FPV mais une chose à la fois.
pour les contrôleurs de vol: il y a ensuite la » NAZE32 » qui est un chouillat et plus supérieure (accessoires)mais peu dispo en livraison à prix bas. attention plusieurs types de naze32.
n’hésitez pas si une question vous trotte. je ne vous promet rien mais si je peux vous aider je le ferai.
c’est mon expérience actuelle et je poursuit.
Bonjour et super tuto, est ce que tu pourrais faire un schema de branchement ( tu fais les ronds pour les moteurs puis des rectangle pour les esc un carre pour le controleur de vol etc…) car je suis un peu perdu merci d’avance
Bonjour,
merci pour le commentaire 😉
comme demandé, j’ai ajouté un schéma à la fin de l’article.
Bon courage pour le montage.
Yann
juste une p’tite question :
concernant le calibrage de la radio par rapport à la carte,doit-on calibrer les gazs(trottle)??
les 2 sticks au milieu ,je n’arrive pas à faire descendre à 0 les gaz
je me contente d’un idle avec les gazs au min et d’un full avec ceux ci à fond
est ce correct??
d’autre part ,il manque peut être un chapitre concernant le calibrage des escs
Merci pour toutes les explications sur la carte KK 2.1.5 un beau boulot de rédaction très utile pour les novices comme moi. Tout est claire! Encore merci Laurent
Merci pour les encouragements.
Ça fait plaisir.
Yann
j’ai galéré plusieurs jours pour régler ma carte kk2 montée sur un quadra et grâce à vous en quelques minutes mon engin vole parfaitement, je tiens à vous remercier .
C’est très agréable de trouver sur le net des personnes compétentes et qui ne passe pas leurs temps à raconter leur vie
Un grand merci et félicitations
Merci beaucoup.
C’est le genre de commentaire qui encourage à continuer de poster sur le blog 😉
Yann
Bonjour.
Super Tuto qui va me servir pour ma KK2.1.5
J’aurais une question pour comprendre.
Pourquoi un UBEC avec les SLIM et on en met pas avec les ESC Normaux ?
Merci
Bonjour,
Si tu regardes bien la photo des ESC SimonK de mon article, il n’y a que 2 fils donc ils ne fournissent pas l’alimentation.
De plus, j’ai préféré être sur du voltage que j’allais envoyé dans la carte KK car elle n’accepte que du 5v.
Fait très attention à ce que tu fais au niveau des connexions car la carte KK ne pardonne aucune erreur.
Elle crame instantanément.
Si tu suis mon tuto à la lettre normalement tu voles à la fin 😉
J’ai eu pas mal de retour positif sur le forum ou des copains de mes clubs. Ils ont réussi tout seul en suivant le tuto.
Bon courage et n’hésites pas à m’écrire si tu as des questions.
++
Yann
Merci pour ta réponse rapide….
Une autre question du coup…
Comment choisir son UBEC ?
Car je suis monter en train de monter un tricopter (en 4S) avec ses moteurs.
http://www.hobbyking.com/hobbyking/store/__44559__NTM_Prop_Drive_Series_28_30S_900kv_270w_short_shaft_version_UK_Warehouse_.html?strSearch=ntm
les ESC : ceux que tu préconises.
Salut,
pour le UBEC c’est assez basique, c’est qu’un simple régulateur de tension.
Celui de ma liste fait largement l’affaire pour ce qu’on fait avec le drone.
++
Yann
Merci …
Hello,
Merci pour les explications .
Pour des ESC non opto faut-il raccorder les 3 cables de chaque ESC sur la kk? j’ai vu quelque part que un seul positif et negatif est necessaire et qu’il vaut mieux couper les autres car sinon cela peu faire sauter la kk… Quelqu’un a des infos ?
Merci d’avance.
Julien
Bonjour Julien,
effectivement il est conseillé de ne garder qu’un seul positif et négatif sur le drone.
Pour ma part, j’ai configuré un drone en laissant tous les fils et la carte KK n’a pas explosé 😉
++
Yann
Bonjour Yann,
merci pour ta reponse , j’ai bien suivi toutes les explications et j arrive au meme resultat sauf que les moteurs ne tournent pas .. je ne comprends pas , quand je pousses le bouton gauche de la telecommande les moteurs font des acous (dont 1 moteur ne bouge pas)et si je le pousse plus fort il se mettent a chauffer et le bip de la kk sonne en continu.. pourtant quand je branches la batterie les 4 moteurs font aussi des petits acous dans le bon sens et tous semble normal .. je sais pas si je suis assez claire 😉
j’ai des moteurs dt750brushed 750kv et esc turnigy 30a brushed
si tu as une explication je suis preneur ..
Bonjour Julien,
je pense que ton problème est lié au fait que tu utilises des moteurs et contrôleurs Brushed (A charbon).
J’ai pas d’expérience sur l’utilisation de la carte KK avec ce type d’équipement.
Je suis même pas sur que la carte KK soit prévue pour fonctionner en Brushed.
Si tu peux faire le test avec du matériel Brushless tu devrais résoudre ton problème (en espérant que tu n’ai pas endommagé la carte)
++
Yann
Super article que je viens de decouvrir ! Je viens de me monter un mini quad avec un chassis maison, et le reste de l’electro sur hobbyking mais je rencontrais des soucis au premier decollage. Grace au tuto tout est bon le quad est stable pour le peu que j’ai testé, il reste juste a peaufiner mais j’ai deja bien avancé grace à toi ! Un grand merci.
Salut,
merci pour ce commentaire qui fait plaisir et content de voir que j’ai pu t’aider à avancer dans ton projet.
++
Yann
Merci pour ton Blog et ce tuto ! Passionné par le DIY, après mon imprimante 3D je me suis mis à construire mon Drone (le vol en FPV me fait rêver !!), j’ai aussi fait le choix du contrôleur de vol « Hobbyking KK2.1.5 » (surtout pour la saisie des paramètres en direct sur la carte avec l’écran LCD), alors j’ai une question de débutant : quelle radiocommande utilisais-tu avec ??
D’avance merci !
Michel
Salut,
J’utilisais une spektrum dx8.
++
Yann
Salut, équipé d’une KK2.1.5
équipé d’une KK2.1.5
Tout d’abord merci pour ton blog très clair. Je suis dans le même cas que Michel, j’ai monté mon imprimante 3D et je suis passé maintenant au drone , avec un châssis que j’ai imprimé, bien sur
Tout semble Ok , sauf les réglages fin du PI. Avant cela , j’ai un soucis lorsque j’essai de la faire volé : quand je met les gaz, a peine légèrement soulevé , il part a droite ( ou a gauche ) et se retourne. j’ai vérifié le sens de rotations des moteurs, la bonne config des hélices , tout semble ok mais …. En même tant , je me satisfais de mon châssis imprimé en 3D, il est mis à rude épreuve et résiste bien !
Sinon , auriez vous une idée de l’origine de mon problème ?
Merci d’avance
Franck ( mon commentaire est parti trop tot )
salut a tous
peut-on mettre un GPS sur cette carte affin d’avoir un retour a la maison
si oui (super)comment le brancher
si non pas de bol
merci de votre reponce
Ping : L’électronique – droneityourself