Calibration du Compas
Allumer la TX avec l’inter sur le mode vole Manuel puis allumer le QuadX. Normalement vous verrez juste la Led Rouge clignoter 3 fois de suite.
Avec votre inter, Il faut passé du mode M à GPS (Ne pas faire l’inverse) rapidement et plusieurs fois (Au moins 3 fois) et finir sur la position GPS et la, la Led Orange doit être FIXE Note : pas besoin d’attendre la connexion des satellites pour passer en mode calibration
Faire un 360 avec le QuadX dans les main à l’horizontal jusqu’à que la Led soit verte FIXE
Puis refaire un 360 avec le Quadx à la vertical jusqu’a que la Led verte s’éteigne.
+ les hélices en carbone et la carte Hobbyking KK2.1.5 … comme dans l’article sur le racer 250.
Vu la taille de l’Héxa et la consommation des moteurs, il va falloir voler en batterie 3S 2200 mah. (Ca m’arrange, j’en ai plein de mes avions…)
Ca y est Hobbyking me livre et je prend la douane (17 €)… En ce moment j’ai pas de chance pour les livraisons.
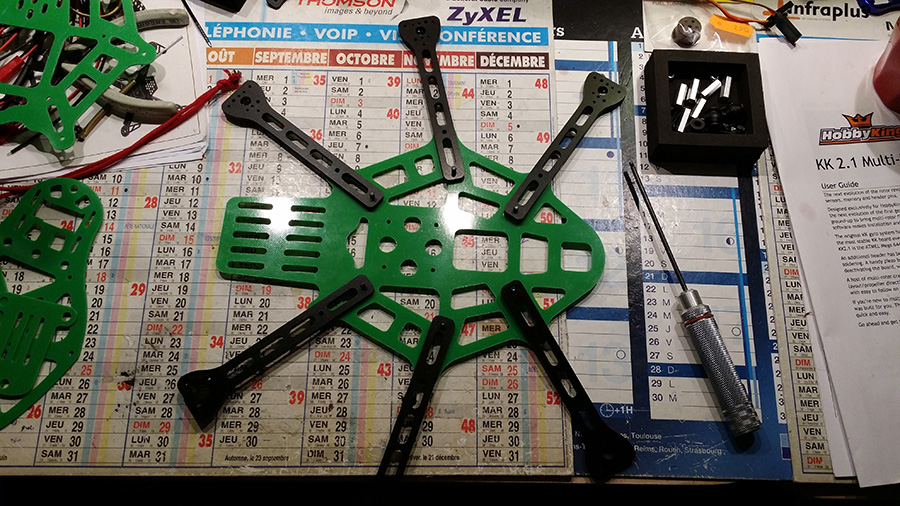
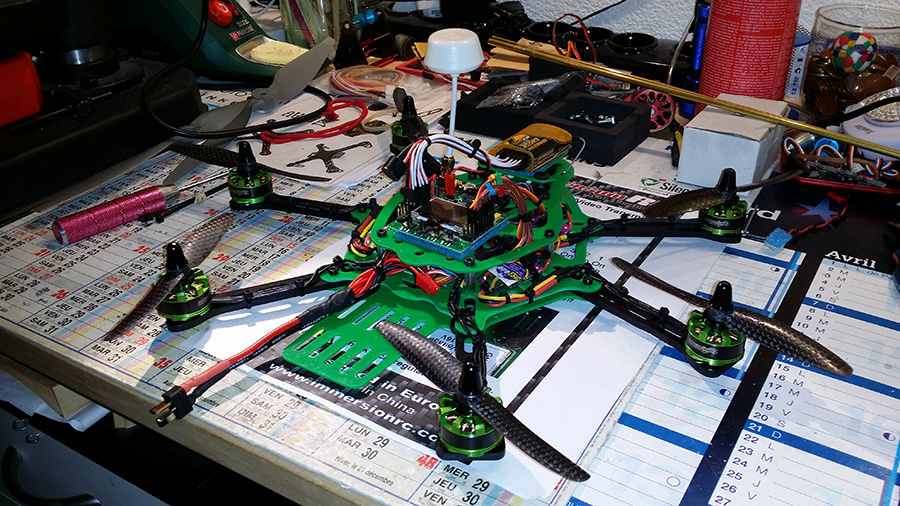
Voici la frame héxa dans son plus simple appareil. C’est tout fibre et ça respire la qualité.
Les bras sont épais et semble plutôt solide
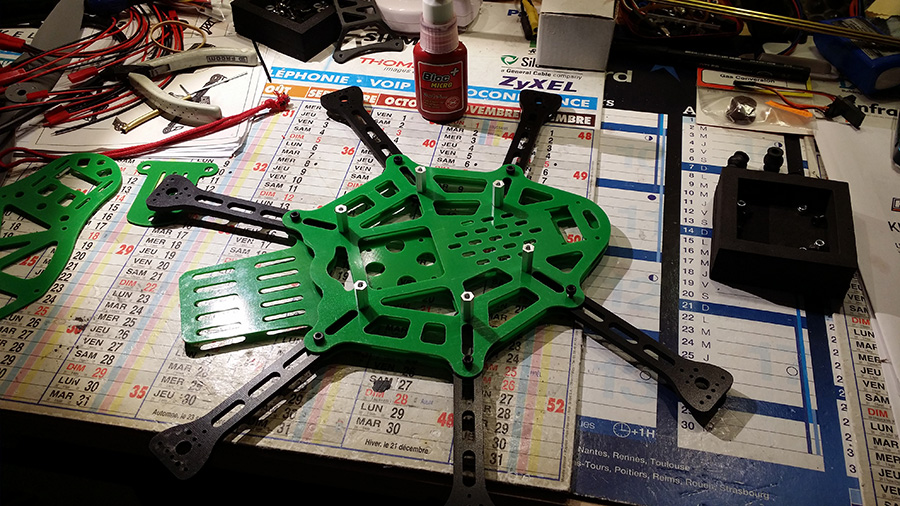
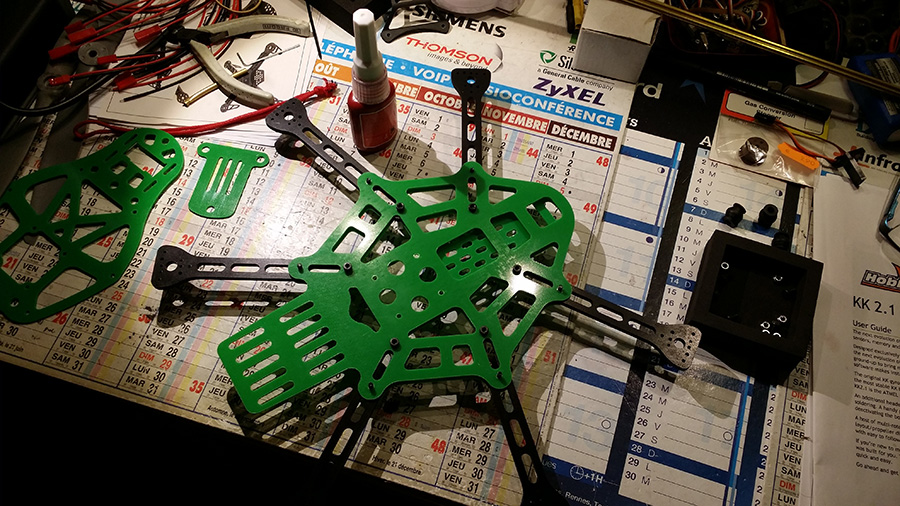
On attaque le montage, en fixant des différentes épaisseurs.
Mettre du frein filet sur toutes les vis, et attention de ne pas trop serrer les colonnettes car j’en ai foiré une (pas terrible).
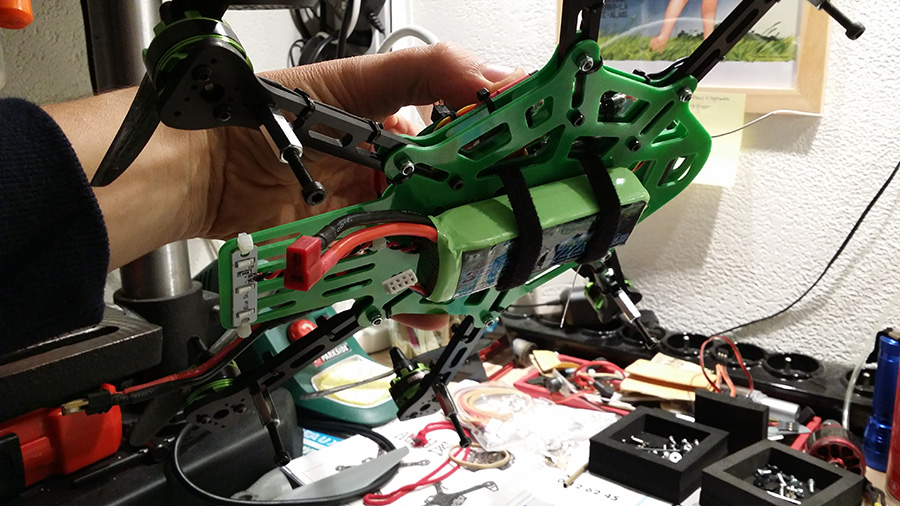
Attention pour le montage des bras, il y a un sens, sinon lorsque vous aller visser les moteurs « Baby Beast » la sortie des fils ne sera pas dans le prolongement des bras.
Ne vous fiez pas à ma photo, car je m’étais trompé, il a donc fallu que je démonte tout à nouveau par la suite.
Pour fixer les moteurs « Baby Beast » il faut agrandir les trous d’origines.
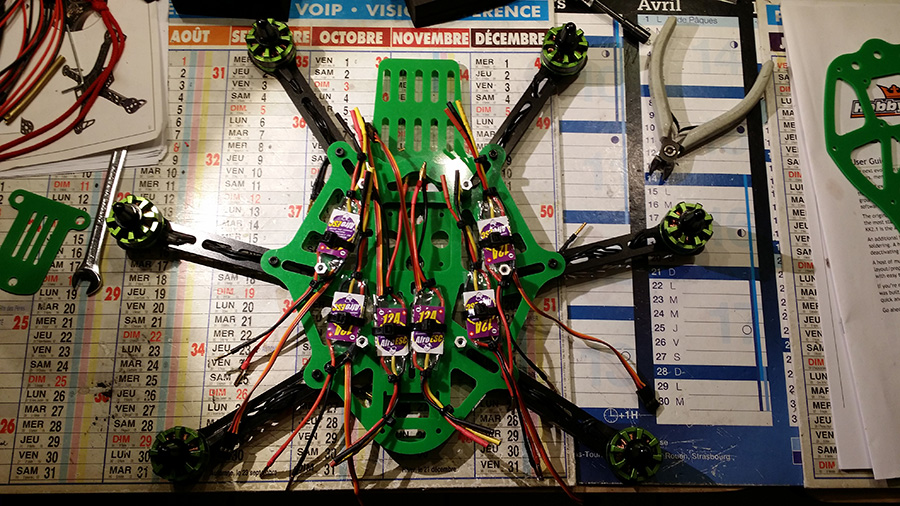
On attaque la fixation des contrôleurs électriques.
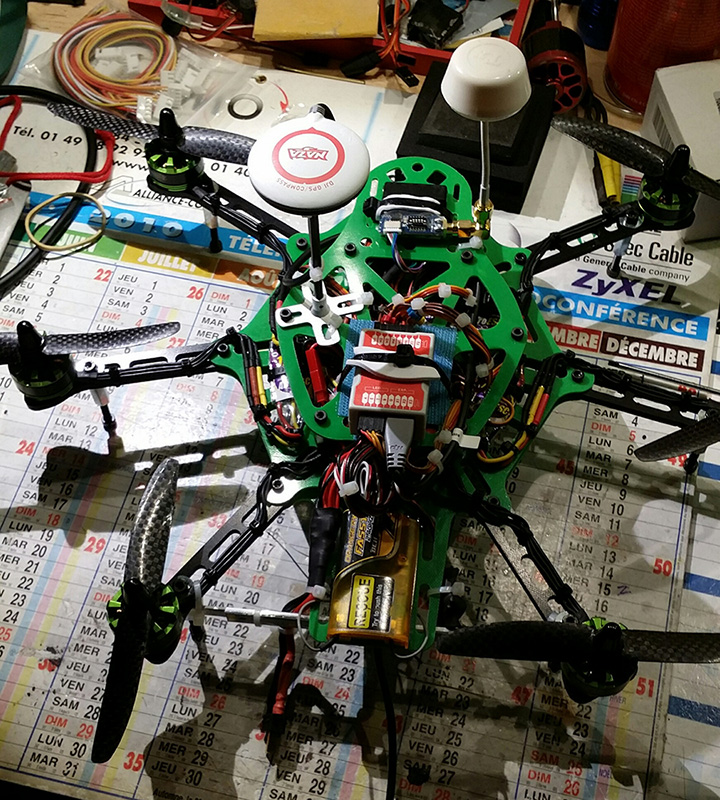
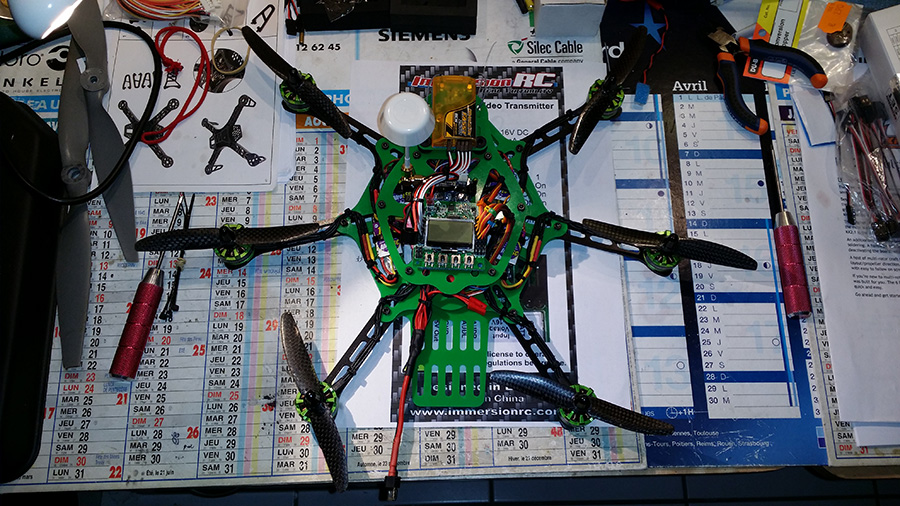
Fabrication de la pieuvre d’alimentation pour connecter toute la filasse 😉
D’un coté je suis en prise Dean (en T) pour la connexion Lipo 3S 2200 mAh, de l’autre j’ai soudé 10 prises JST mâles. (6 pour les contrôleurs électriques, 1 pour la sonde voltage du contrôleur de vol KK, 1 pour la connexion FPV camera et émetteur, 2 pour les LED…)
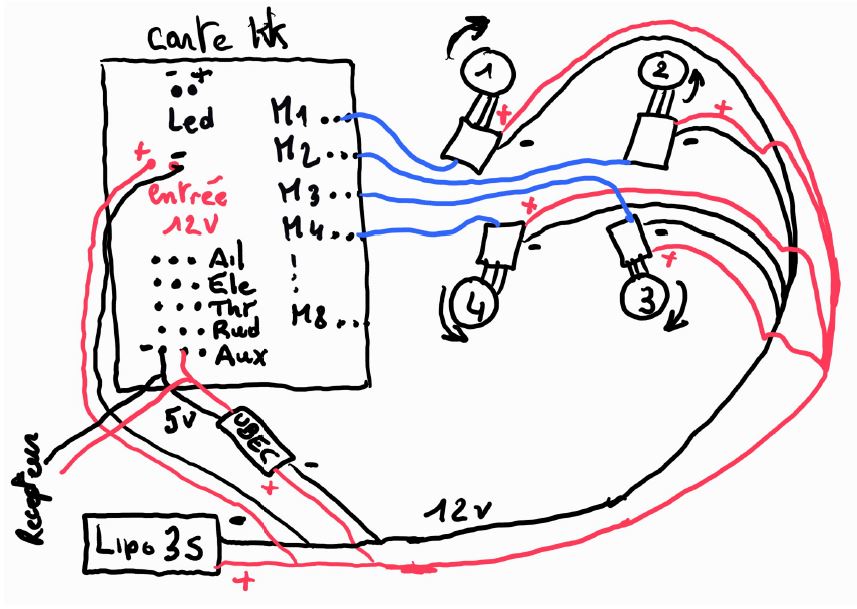
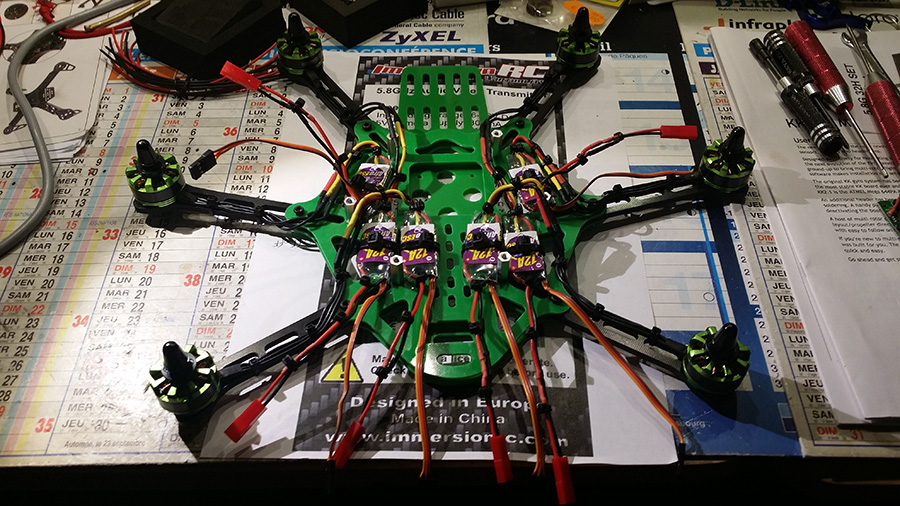
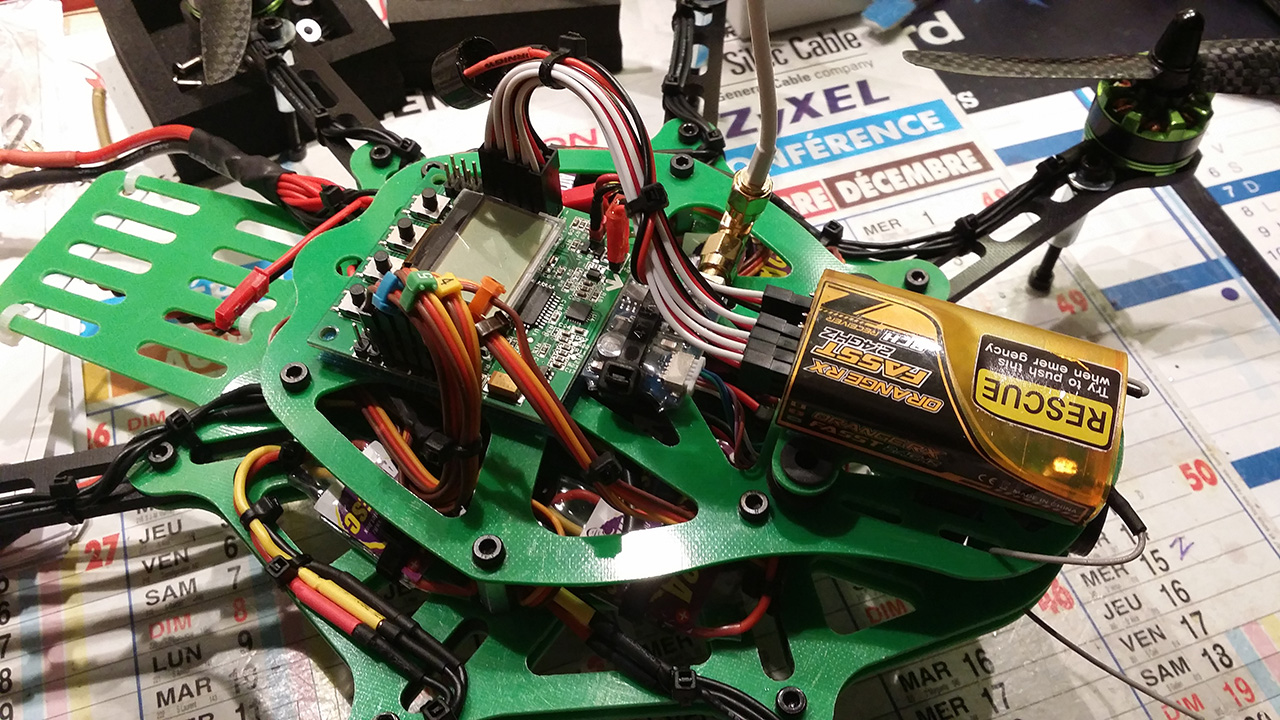
!!! Attention, je profite d’être à ce niveau de l’article pour attirer votre attention sur les branchements électriques sur la carte contrôleur KK.
Vous voyez que j’ai volontairement soudé un connecteur sur la sonde 12v de la carte contrôleur de vol, afin d’éviter de brancher par erreur une connexion 12v sur la prise buzzer située à coté.
Mon copain Nicolas qui suivait mon tuto a fait l’erreur… et PAF odeur de cramé… le contrôleur est mort. Faites attention sur ce point car la prise buzzer aime pas recevoir du 12v…
Dans mon cas, sur la photo la caméra FPV est à l’envers (encore une erreur… décidément)
Il faut que la prise blanche soit en dessous.
Au niveau paramétrage du contrôleur de vol KK, on reprend le paramétrage et la méthodologie de l’article du Drone 250.
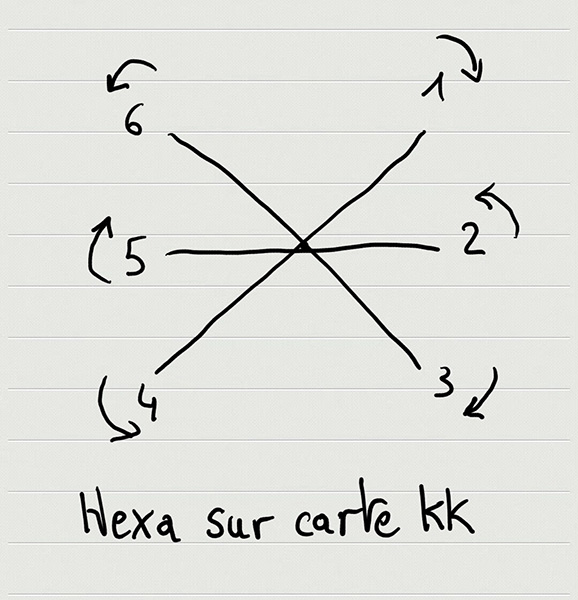
Il faut juste choisir le Motor Layout HexaCopter x mode, et bien contrôler le sens de rotation des hélices…
Comme d’habitude, pour changer le sens de rotation d’un moteur, il faut intervertir 2 des 3 fils qui vont du moteur au contrôleur électrique.
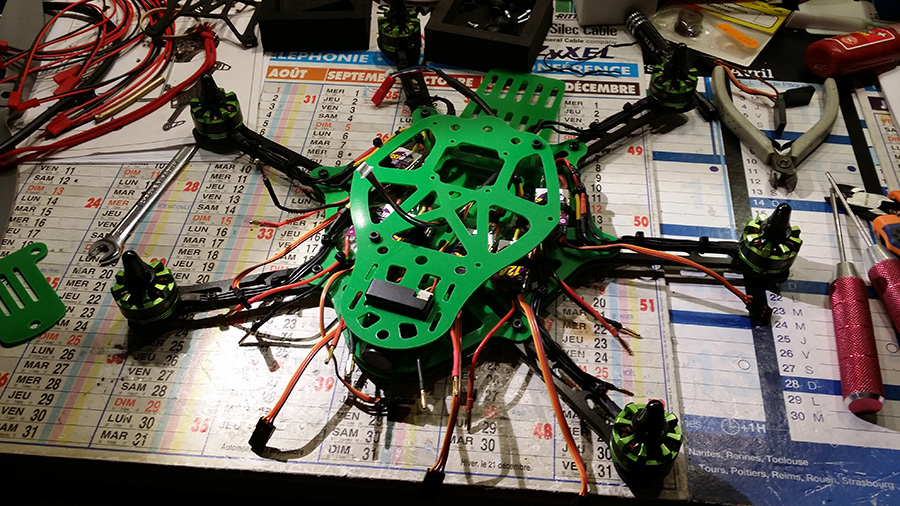
Je manquais de place pour fixer la batterie en respectant un centrage convenable, du coup j’ai fabriqué des pieds avec ce que j’avais sous la main 😉
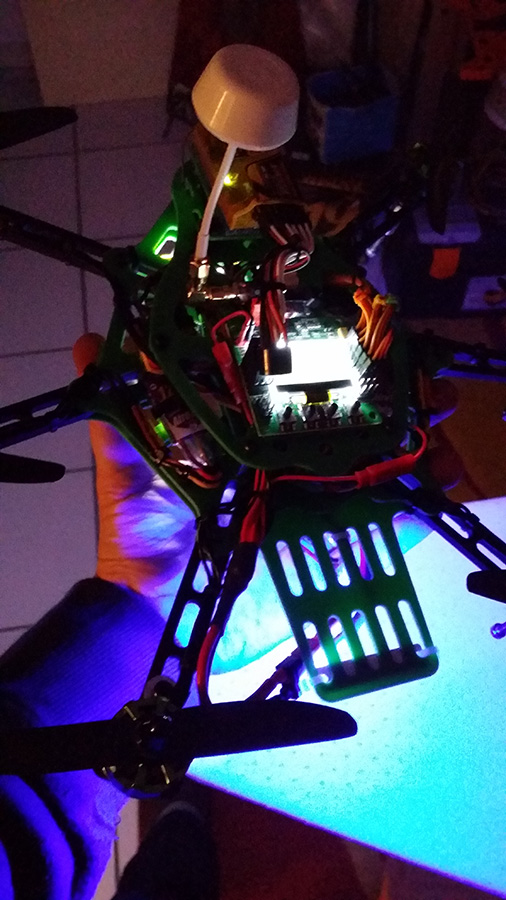
Le voila fini avec un Led de récupération en attendant mes barres de Led de 3w… (voir prochain article)
Mise à jour du 7 décembre 2014.
Premier vol avec cette configuration samedi dernier…
Le drone est très puissant, très vif… trop vif… Il faut reprendre certains réglages pour adoucir son vol.
J’ai volé avec un minimum de Led puisque j’étais en mode test, du coup la plafond étant très bas ce jour là, après quelques dérives l’emmenant de plus en plus loin, j’ai perdu le drone… puis la réception radio…
Il a volé 2 kms tout seul tranquille et il est tombé dans des jardins ouvriers assez loin du terrain ou je vole. Je l’ai récupéré grâce à un coup de chance et à l’honnêteté du gardien des jardins (Que je remercie vivement ).
Bilan 4 hélices carbones HS, et une lipo 3S. Mais je m’en sort bien 😉
Du coup j’ai changé le contrôleur de vol pour passer sur un modèle NAZA Lite + GPS acheté d’occasion sur leboncoin (95 euros).
Ca sera plus rassurant avec le mode RTH (return to home) : pour ceux qui connaissent pas, grâce au GPS, le drone revient ce poser tout seul à l’endroit ou il a décollé…
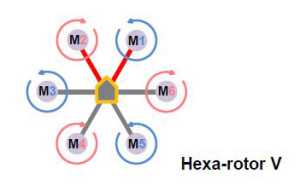
Alors attention si vous optez pour ce choix, il va falloir inverser le sens de rotation de tous les moteurs (en changeant le branchement de 2 fils par moteur) et intervertir les hélices également.
Si vous comparez le schéma ci-dessus (NAZA) par rapport à mon précédent schéma (KK), vous pouvez voir que le sens de rotation des moteurs a changé.
J’ai également installé des Leds 3W très puissant voir aveuglant 😉 qui permette de voir le drone dans toutes les circonstances. (C’est ici chez Hobbyking)
Question consommation, j’ai fais quelques test en branchant le Led blanc 3w sur une lipo 3S 1300 mAh jusqu’à atteindre 3.5v par cellule (valeur de décharge importante d’une lipo).
Il faut 55 minutes pour vider la lipo 3S 1300 mAh…
Soit un total sans le port et sans récepteur : 156.24 €
Après les courses, et la livraison, il faut attaquer le montage.
Globalement, le châssis plastique est facile à monter. Vous pouvez choisir de monter ou pas la partie rectangulaire centrale.
Pour ma part j’ai fait le choix de ne conserver que les extensions plates qui viennent allonger le châssis. (recherche de gain de poids)
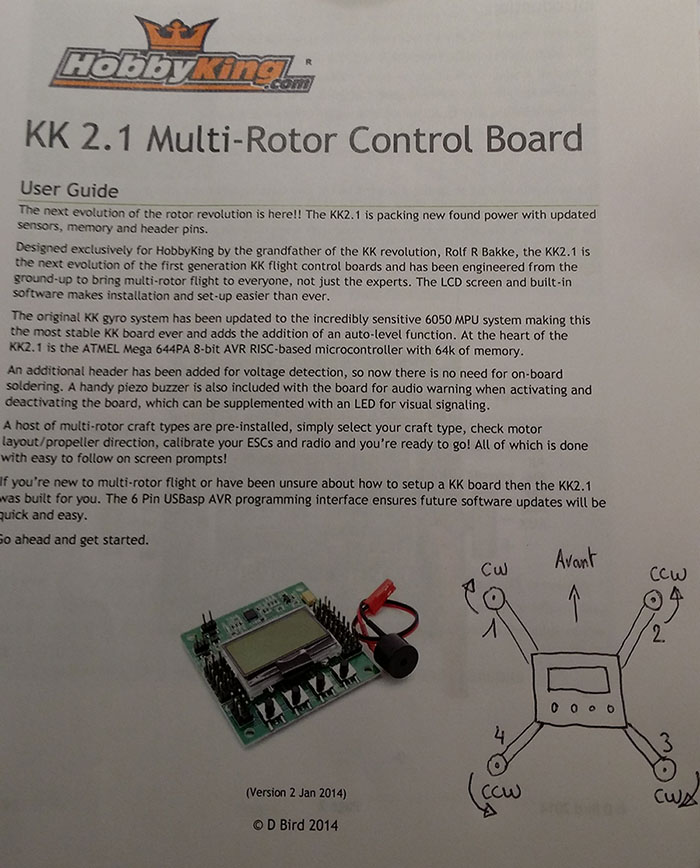
J’ai fait le choix d’acheter un contrôleur de vol Hobbyking KK 2.1.5 pour son prix et la facilité de mise en œuvre (même si la documentation est inexistante à la livraison).
On va pouvoir parler maintenant du matériel reçu…
Pour les moteurs, rien à dire c’est fait pour. (Maj : après quelques vols, je constate que ça tient vraiment la route. Très puissant et résistant)
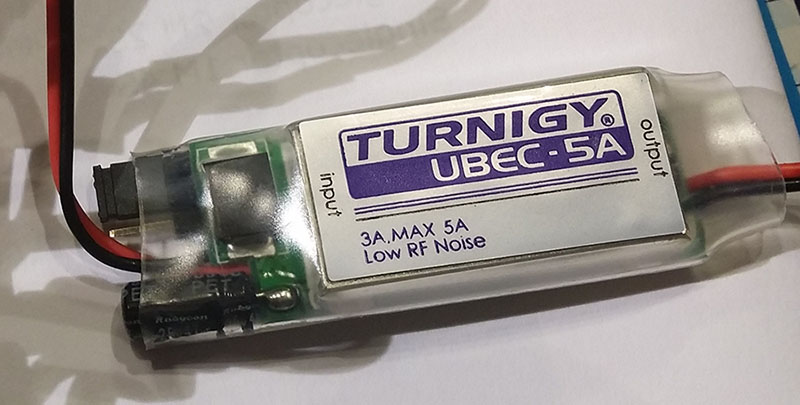
Passons à la partie ESC (controleur électrique des moteurs), ceux choisis dans la liste sont OPTO, c’est à dire qu’ils ont 2 fils au lieu de trois au niveau de la prise servo, ils n’alimentent pas en 5v par le fil rouge du milieu. Il va vous falloir un UBEC pour convertir la tension 12v de la lipo de propulsion en 5V pour alimenter le contrôleur de vol du drone.
NB : J’ai choisi ces contrôleurs de vol, car ils sont équipés du firmware SIMONK particulièrement adapté à l’utilisation en drone car beaucoup plus réactif qu’un contrôleur électrique classique. (pour info : un comparatif entre un contrôleur normal et un SIMONK)
Bien vérifier sur le UBEC, que le cavalier est sur la position 5v.
Passons au montage du drone.
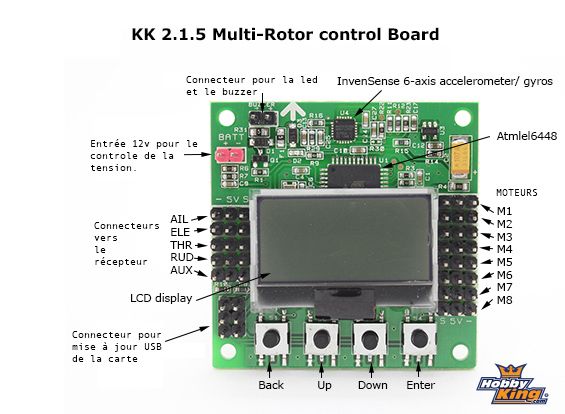
Une fois que vous avez monté le châssis, vous devez fixer le contrôleur de vol au centre. Attention il y a un sens :
L’écran doit être dans le sens de l’avant du drone. (C’est important)
Je profite du schéma pour vous indiquer le sens de rotation des moteurs, les numéros des moteurs pour une configuration quadricoptère.
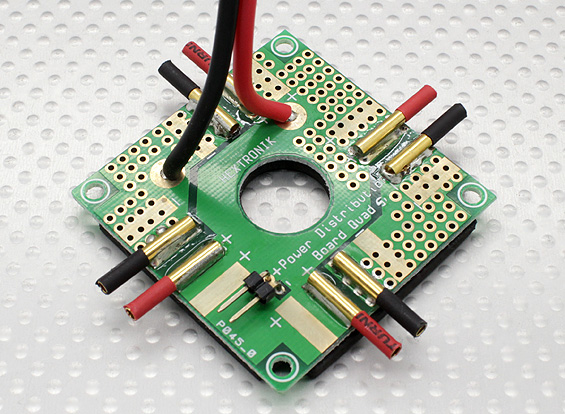
La batterie Lipo 3S doit alimenter en 12v les 4 contrôleurs des moteurs (les fils rouge et noir avec la prise dorée), soit vous soudez les fils entre eux, soit vous utilisez la carte « Power distribution board »
Egalement, vous devez prévoir une connexion directe 12v pour aller vers la prise rose du contrôleur de vol (en haut à gauche du schéma ci-dessous). Cela permet au contrôleur de vol de savoir le voltage de la lipo et de vous prévenir quand la batterie devient faible.
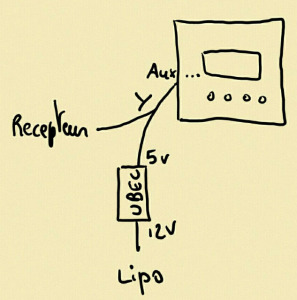
Et pour finir, comme nous avons utilisez des contrôleurs électriques OPTO, il faut prévoir une alimentation 12v pour l’entrée du UBEC (qui transformera en 5V à la sortie pour alimenter la carte contrôleur de vol).
Prévoir un Y sur la connexion AUX servo sur la carte contrôleur de vol, afin de l’alimenter en 5V (sur le Y, la connexion 5V venant du UBEC, et la connexion vers la voie AUX du récepteur)
Normalement, si vous avez été bon 😉
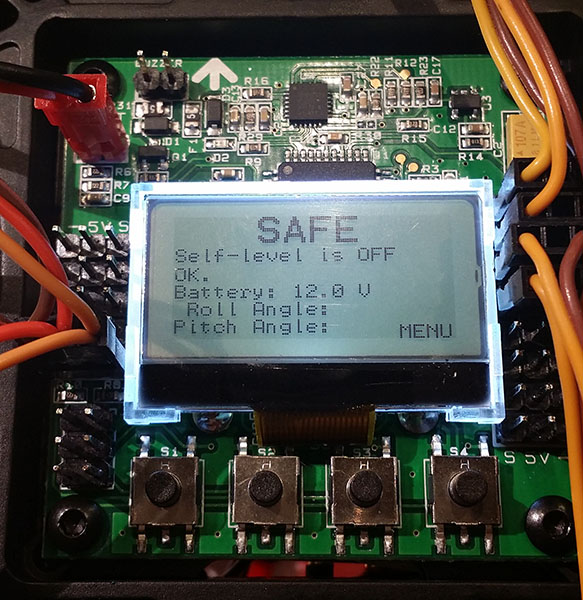
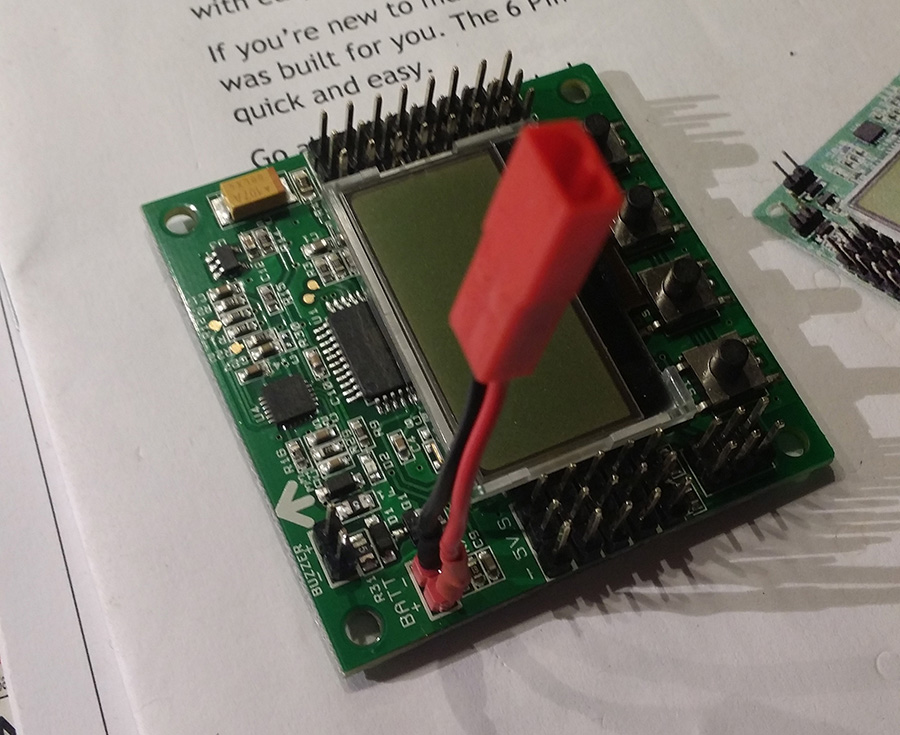
Ca n’a pas fumé, et le contrôleur de vol affiche :
Vous pouvez voir :
1) Que c’est allumé 😉 .. C’est déja pas mal
2) Que le contrôleur affiche Battery : le voltage de votre lipo
La on est bon pour la suite…
On attaque le paramétrage du contrôleur de vol
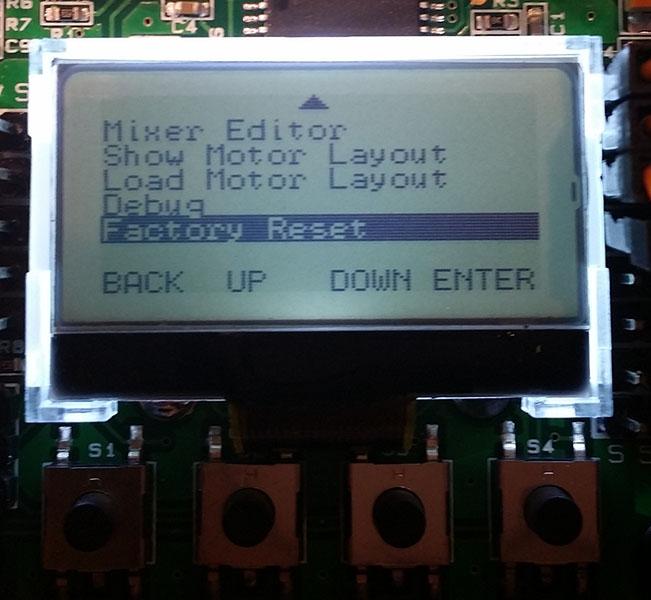
Déjà on commence par faire un reset du contrôleur pour partir au propre :
Bouton (à droite) : Menu, et vous descendez avec les boutons UP / DOWN pour aller sur la ligne FACTORY RESET et vous appuyez sur ENTER.
Voila on part au propre avec les réglages usine.
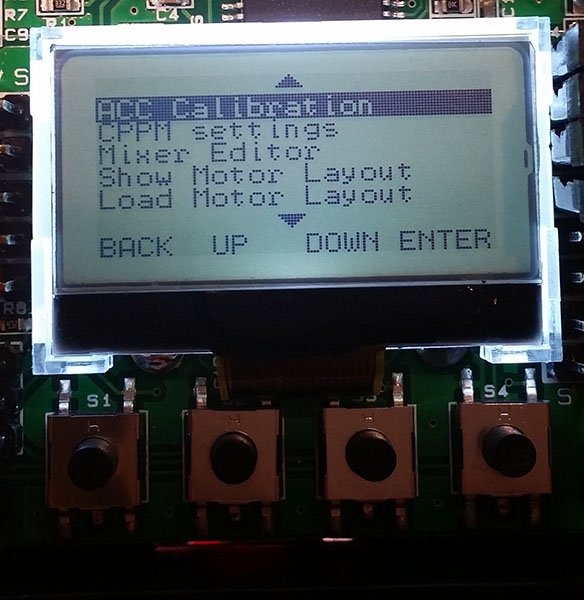
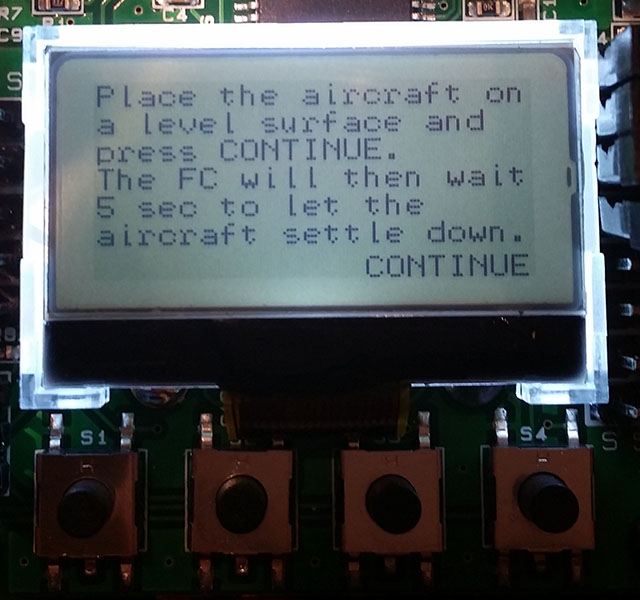
Maintenant vous mettez le drone sur une surface plane et bien horizontale.
Car on va calibrer les gyroscopes qui servent pour la stabilisation en vol, donc on pose pas le drone à l’arrache au milieu des outils et du bordel sur l’établie 😉
Vous allez sur la ligne ACC CALIBRATION, et vous appuyez sur ENTER.
Vous appuyez sur CONTINUE à chaque fois.
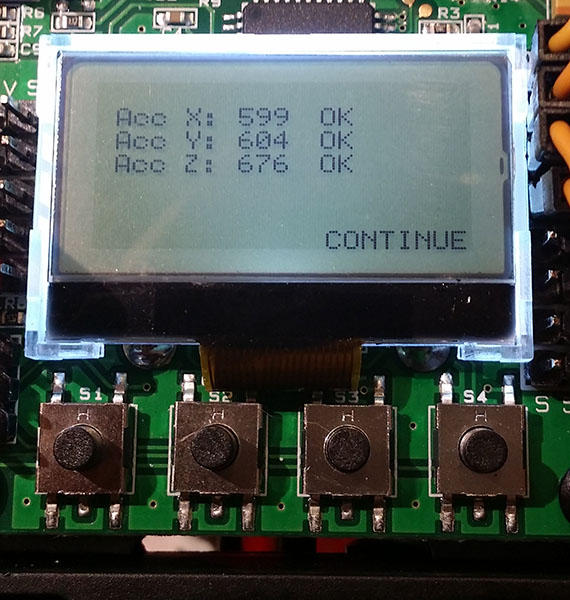
Normalement c’est bon, le contrôleur de vol est calibré à l’horizontal.
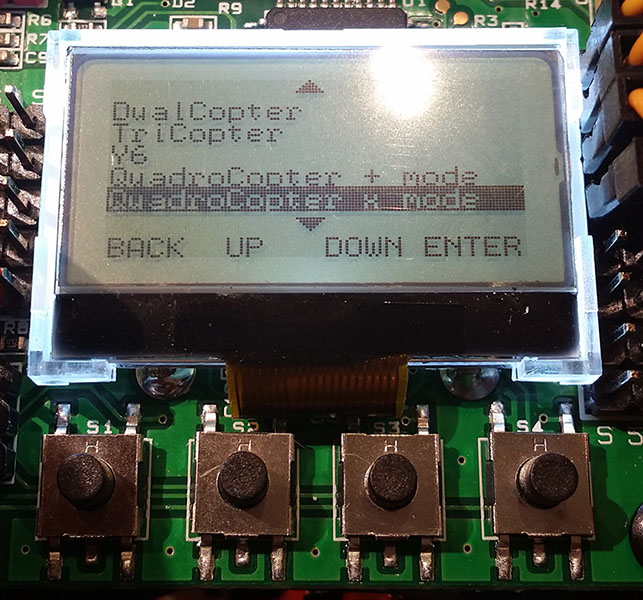
C’est maintenant le moment de dire au contrôleur de vol ce qu’on a comme drone
Dans notre cas, c’est un classique Quadricoptère en X
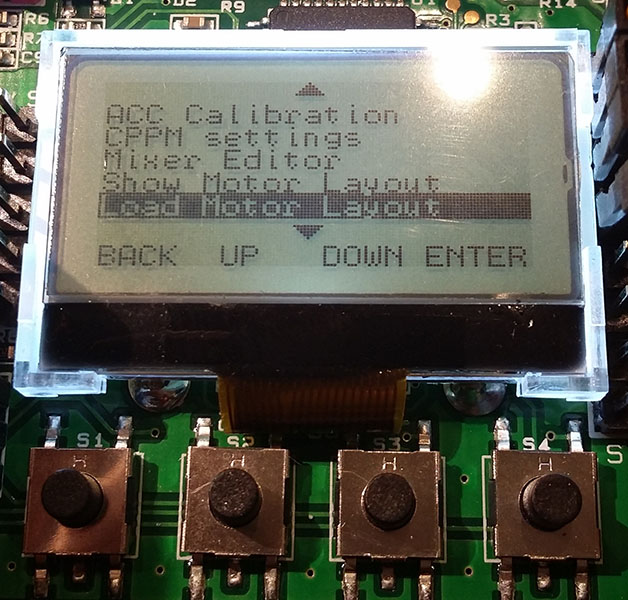
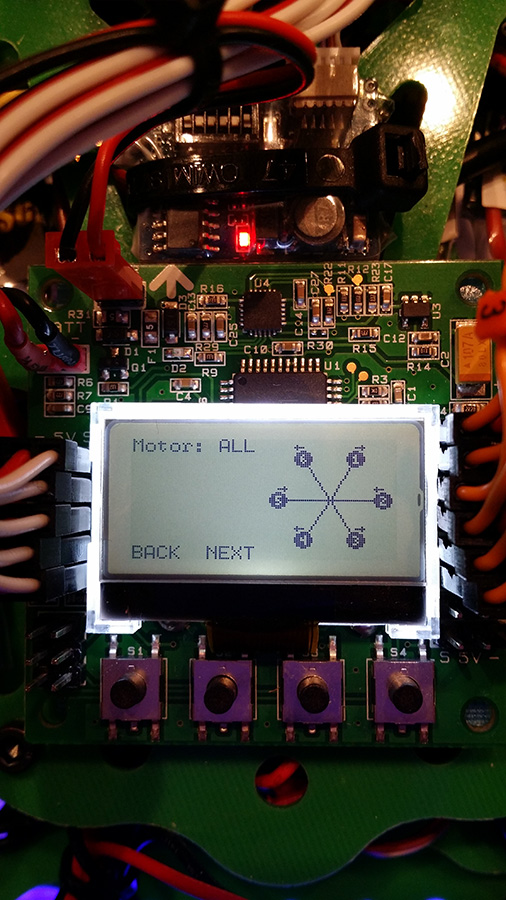
Vous allez sur la ligne LOAD MOTOR LAYOUT, et vous appuyez sur ENTER.
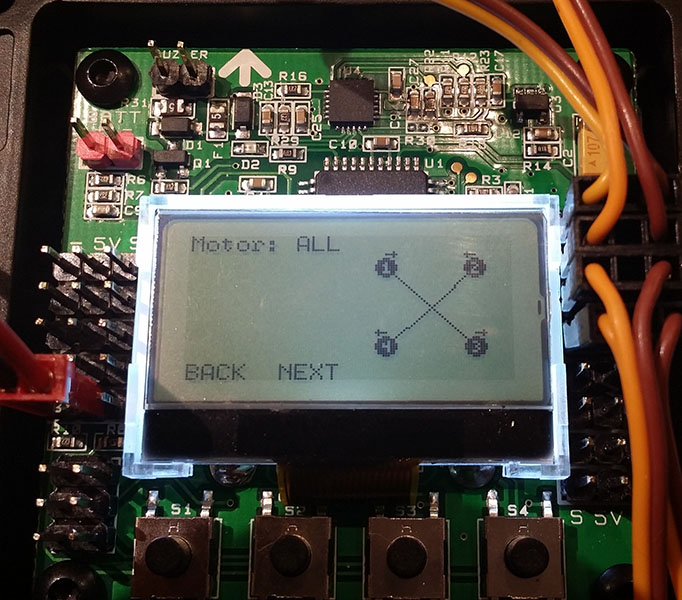
Vous pouvez voir sur l’écran le numéro des moteurs, avec le sens de rotation des hélices. (C’est important pour la suite).
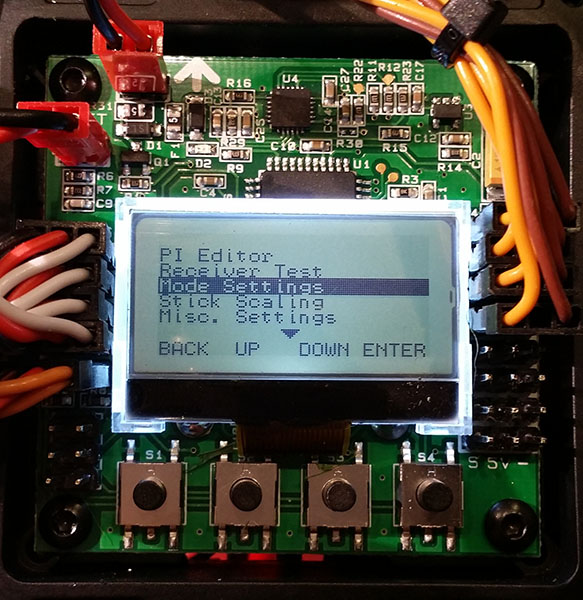
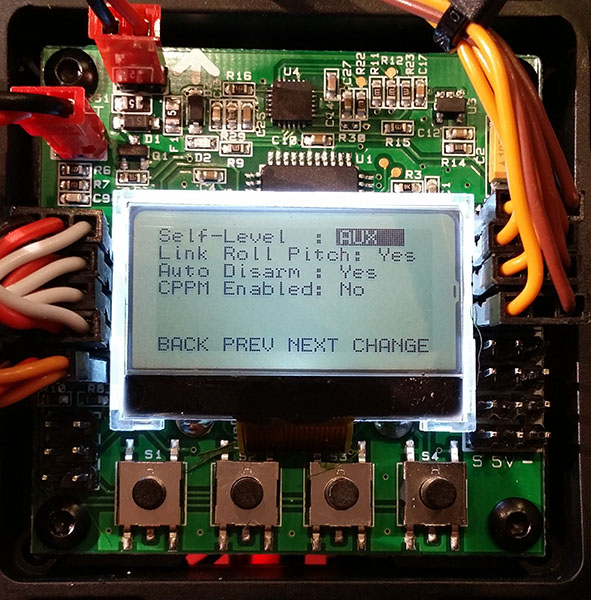
Il reste à programmer la voie AUX afin d’avoir un bouton sur la télécommande qui permettra de choisir de voler avec une assistance stabilisation active ou pas (mode manuel pour faire des loopings 😉 )
Vous allez sur la ligne MODE SETTINGS, et vous appuyez sur ENTER.
Vous appuyez ensuite sur ENTER pour afficher le mode AUX, et vérifiez en même temps que les autres paramètres sont comme sur la photo.
Vous faites BACK, c’est bon, le contrôleur de vol est configuré.
Sur cette dernière photo vous voyez à droite les 4 connexions des contrôleurs électriques des moteurs 1 à 4 du drone.
Faites pareil et ne vous trompez pas dans la connexion…
le moteur 1 sur la connexion 1, etc…
Sur la gauche en haut : vous voyez l’arrivée 12v qui vient de la batterie Lipo 3S
Sur la gauche en bas : vous voyez le Y avec la connexion 5v du UBEC, et la prise AUX qui va au récepteur.
Il faut maintenant connecter le récepteur sur le contrôleur de vol
Sur FUTABA, j’ai fait la connexion suivante :
AIL vers la voie 1
ELE vers la voie 2
THR vers la voie 3
RUD vers la voie 4
AUX vers la voie 7
Avec une autre marque, débrouillez vous pour respecter les standards de la radio.
AIL (Ailerons), ELE (profondeur), THR (Gaz), RUD (Dérives), AUX (bah… c’est AUX )
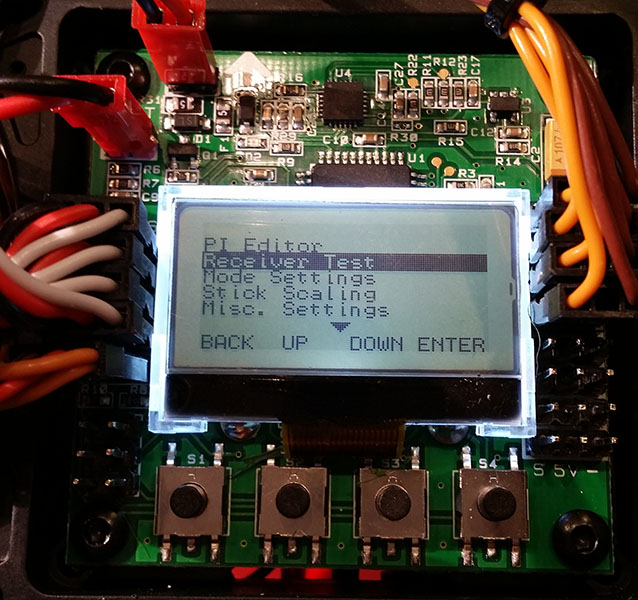
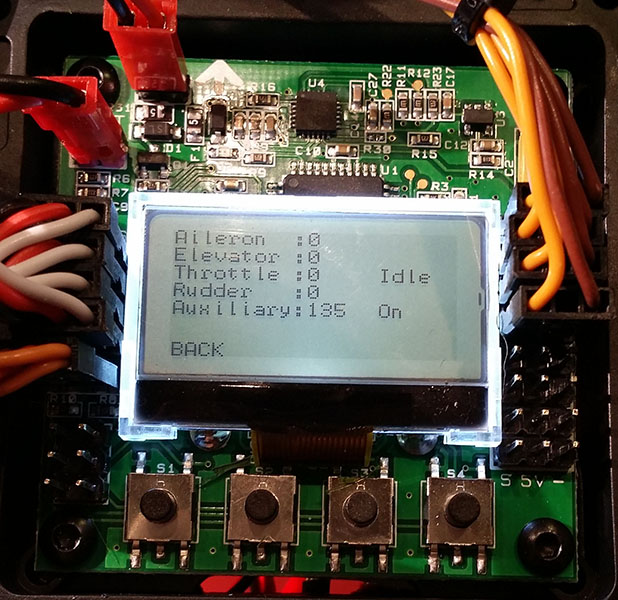
Une fois la connexion effectué sur les voies et la voie AUX attribuée à un bouton 2 positions, il faut aller dans le menu du contrôleur de vol à la ligne RECEIVER TEST, et vous appuyez sur ENTER.
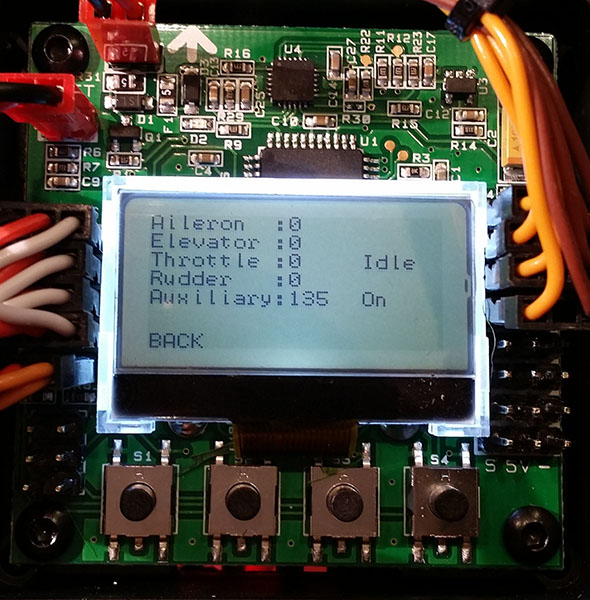
Avant de commencer tout paramétrage, vous devez être au neutre entre la télécommande et le contrôleur de vol.
Votre contrôleur de vol doit être à zéro comme la photo ci-dessous. Si ce n’est pas le cas, vous devez jouer avec vos Subtrim sur la télécommande pour que toute les voies soit à zéro (sauf le bouton aux).
Nous allons maintenant tester votre configuration voie par voie.
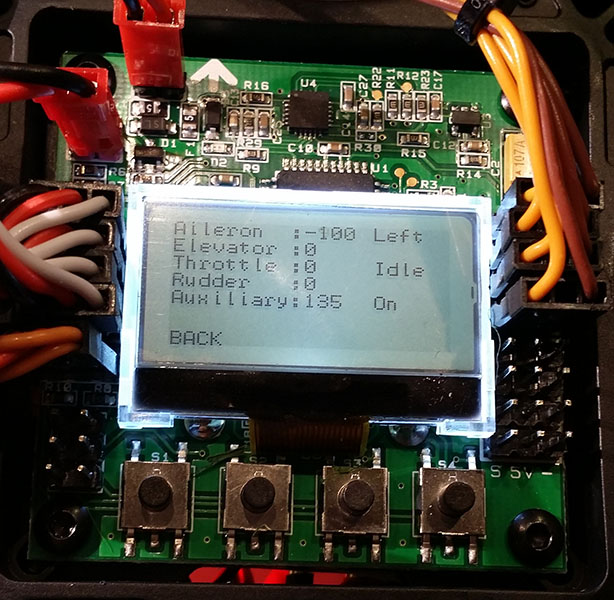
Sur votre radio, bougez les ailerons à GAUCHE, normalement l’écran affiche LEFT à coter de AILERON.
Puis à droite, normalement l’écran affiche RIGHT à coter de AILERON
Si c’est inversé, à vous de paramétrer la fonction reverse sur votre radio pour la voie AILERON.
Vous faites les mêmes tests pour toutes les voies… (Je vais pas tout faire non plus 😉 )
Testez aussi le fonctionnement du bouton affecté à la voie AUX
Dans notre exemple, mon bouton est configuré sur ON (on voit Auxiliary : 135 ON), donc le drone à la stabilisation d’activée.
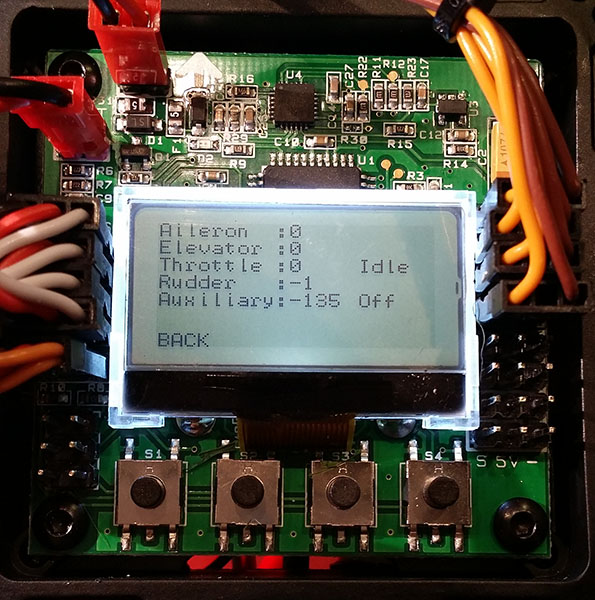
Je change la position du bouton sur la télécommande sur OFF et ca passe sur l’écran en OFF
A ce niveau si tout est comme j’ai dit… CA VA VOLER
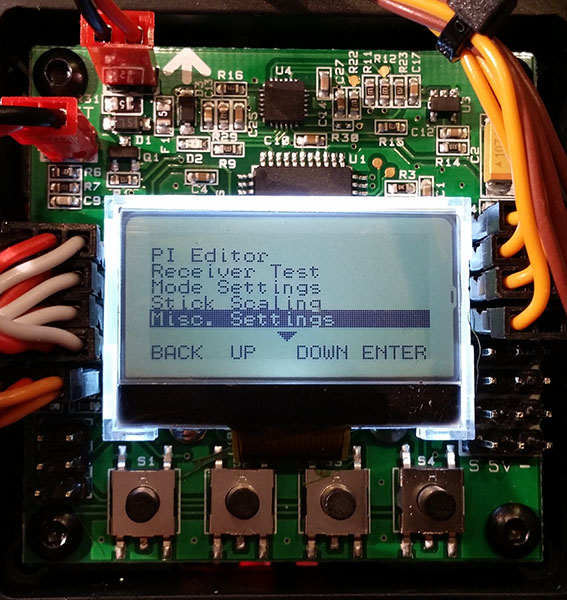
Maintenant on peaufine les réglages avant d’aller voler…
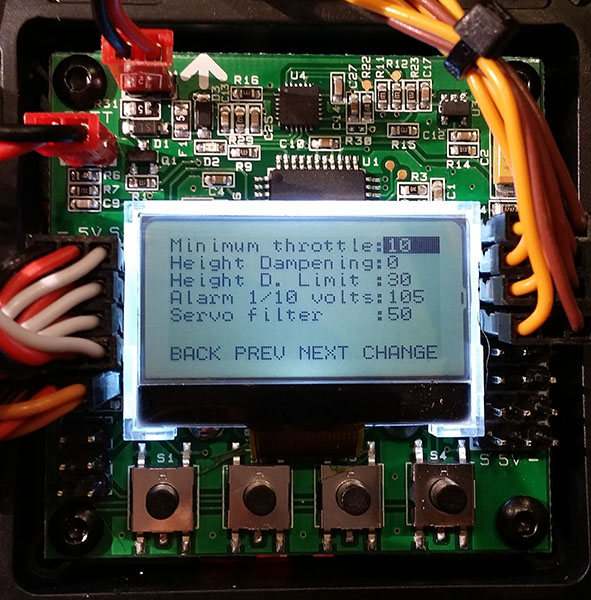
Vous allez sur la ligne MISC. SETTINGS, et vous appuyez sur ENTER.
Puis vous allez modifier le paramètre ALARM 1/10 VOLTS :
Alarme sur lipo faible et vous entrez 105 pour 10,5v, le buzzer va sonner, et la led clignoter quand vous serez en alarme batterie.
On va maintenant mettre des réglages optimisés (par rapport à notre configuration) pour le contrôleur de vol.
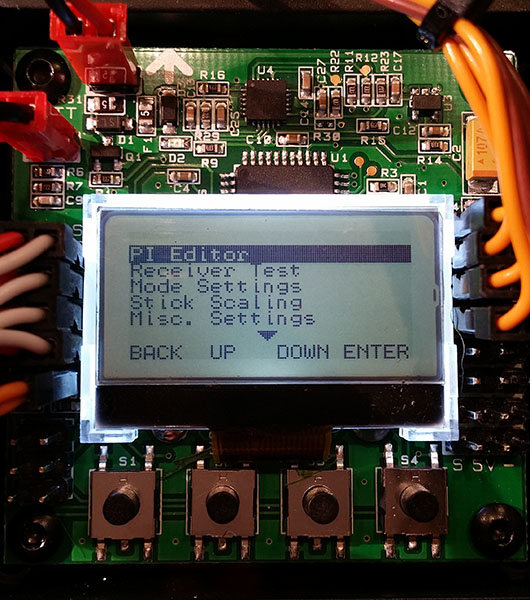
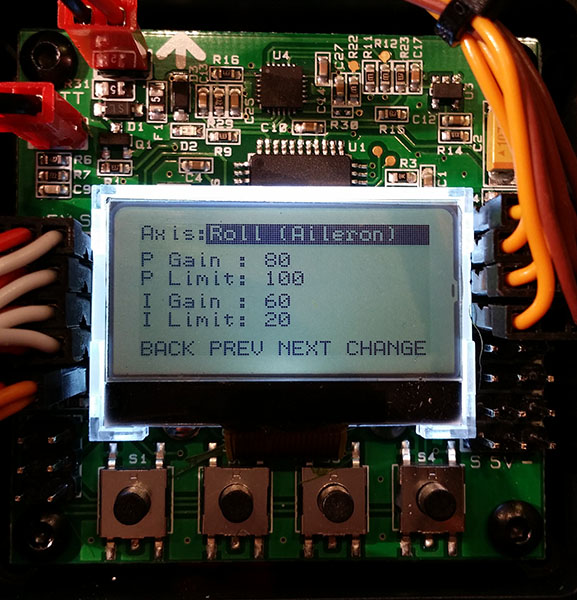
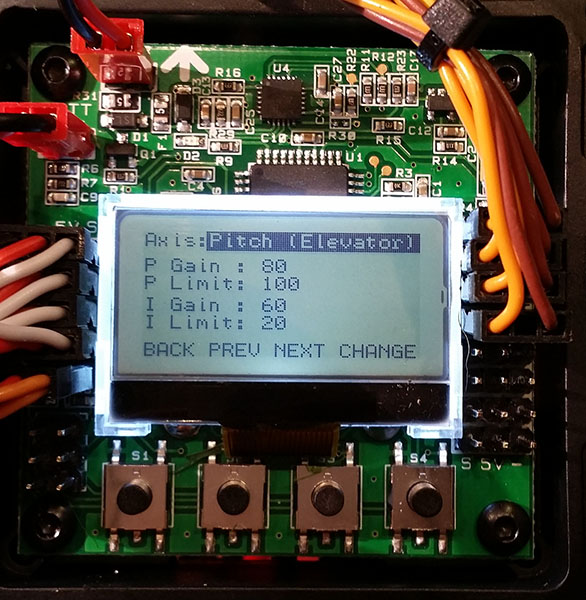
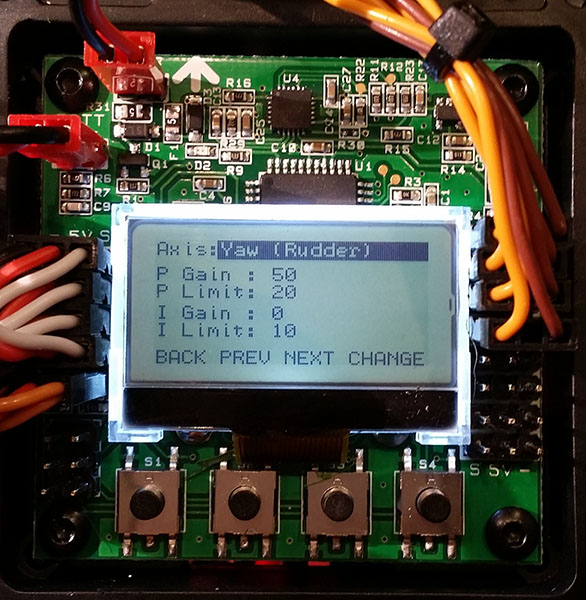
Vous allez sur la ligne PI EDITOR, et vous appuyez sur ENTER.
Après quelques vols, j’ai mis les valeurs ci-dessus.
Au départ vous pouvez mettre :
P GAIN = 30
P LIMIT = 100
I GAIN = 0
I LIMIT = 20
Après quelques vols, j’ai mis les valeurs ci-dessus.
Au départ vous pouvez mettre :
P GAIN = 30
P LIMIT = 100
I GAIN = 0
I LIMIT = 20
Vous faites BACK.
C’est bon vous pouvez maintenant monter vos hélices en respectant le plan plus haut.
Hélice R sur le moteur 1, et 3
Hélice classique sur le moteur 2 et 4
Testez le sens de rotation pour chaque moteur. Si le moteur ne tourne pas dans le sens indiqué sur le plan, vous devez inverser 2 fils sur les 3 du moteur.
C’est fini, faut aller voler
Quand vous branchez la lipo, le contrôleur de vol s’allume et affiche SAFE (il est en sécurité).
Au passage vérifiez bien que vous décollez en mode stabilisé, sinon c’est le crash assuré pour les débutants…
SELF-LEVEL IS ON (vérifier la position du bouton sur la radio)
Pour activer le drone et décoller vous devez mettre les manches de la radio pendant 3 secondes comme ci dessous :
Pour mettre en drone en mode sécurité à l’atterrissage, vous devez mettre les manches de la radio pendant 3 secondes comme ci dessous :
PS : Désolé pour le dessin de la radio, j’ai fait comme j’ai pu
A vous de jouer et attention aux doigts avec les hélices 😉
Voila le premier vol du drone avec 30 km/h de vent.
Modification et amélioration du drone après utilisation.
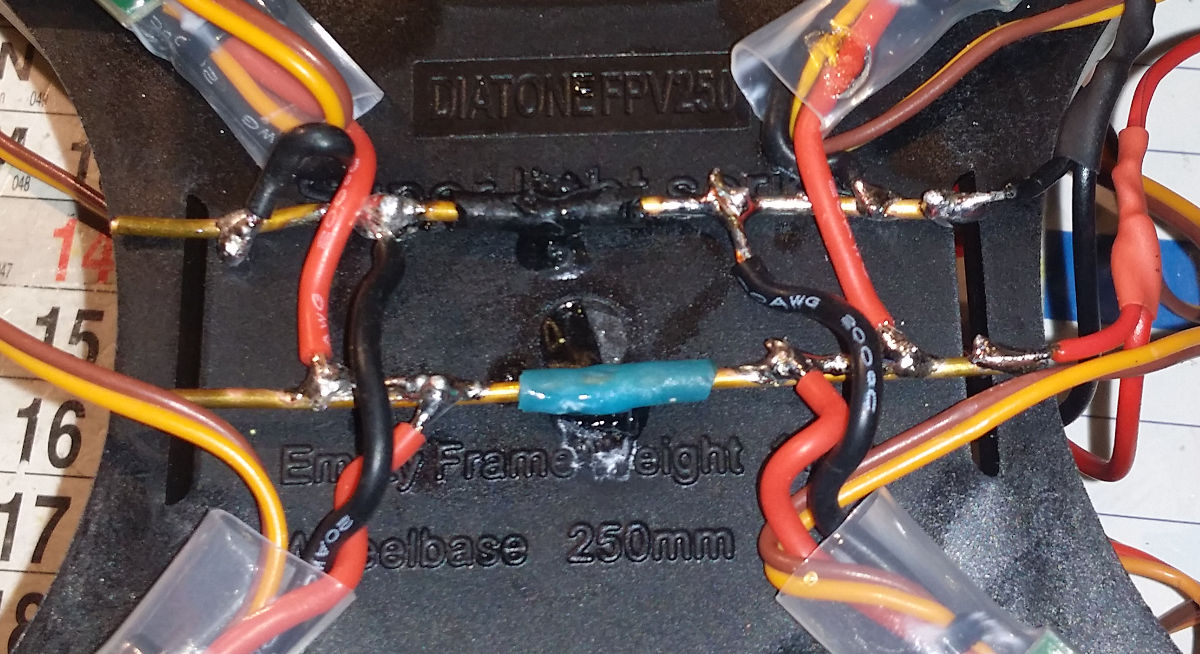
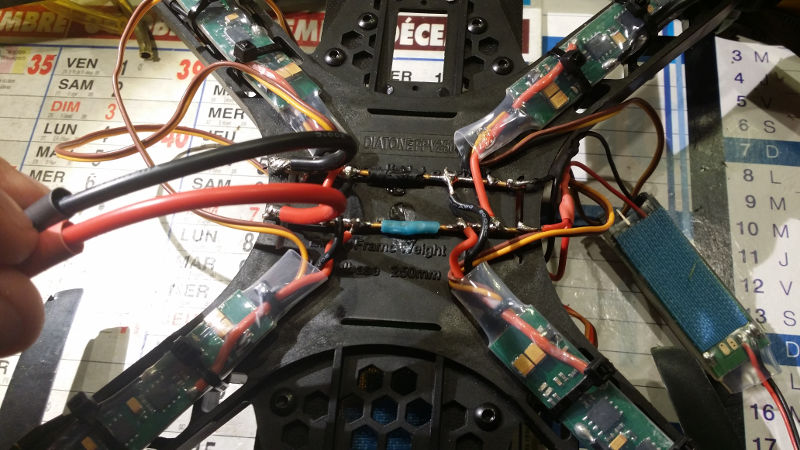
J’ai démonté la carte de distribution qui était trop grosse dans ma configuration. Afin de réduire la quantité de fil trop long j’ai opté pour la fabrication d’une distribution d’énergie à partir de 2 fils en cuivre dur (ceux d’électricité 220v).
Le – est sur le fil de cuivre du haut, et le + sur le fil de cuivre du bas.
J’ai ensuite isolé l’ensemble avec de la gaine thermo et dans de la résine époxy au centre pour fixer les fils.
Par dessus j’ai fixé le UBEC qui a la bonne dimension pour passer entre les 4 contrôleurs électriques.
On verra ce que ca donne à l’usage mais faut optimisé l’espace…
Suite à une demande dans un commentaire, j’ai rajouté un petit schéma de connexion sur la carte KK.










 ).
).