Après la construction du Drone Racer 250 (voir article précédent), je suis parti sur la même base pour construire un racer en héxacoptère.
Le coté araignée volante me plait 😉
On va voir ce que ça donne :
Une commande chez HK :
Hobbyking Thorax Mini FPV (23.99 €)
Multistar V2 2206-2150KV Motor The « Baby Beast » (V2) (Quantité 6) (71.94 €)
+ les hélices en carbone et la carte Hobbyking KK2.1.5 … comme dans l’article sur le racer 250.
Vu la taille de l’Héxa et la consommation des moteurs, il va falloir voler en batterie 3S 2200 mah. (Ca m’arrange, j’en ai plein de mes avions…)
Ca y est Hobbyking me livre et je prend la douane (17 €)… En ce moment j’ai pas de chance pour les livraisons.
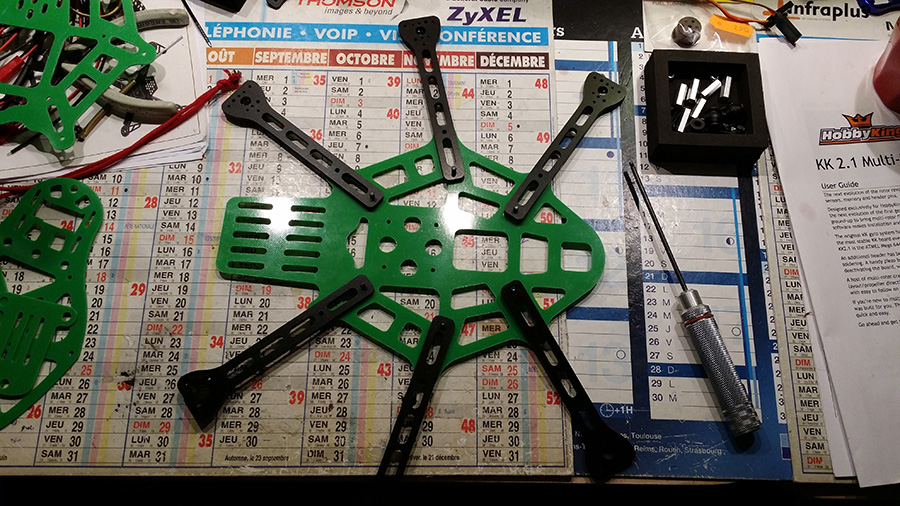
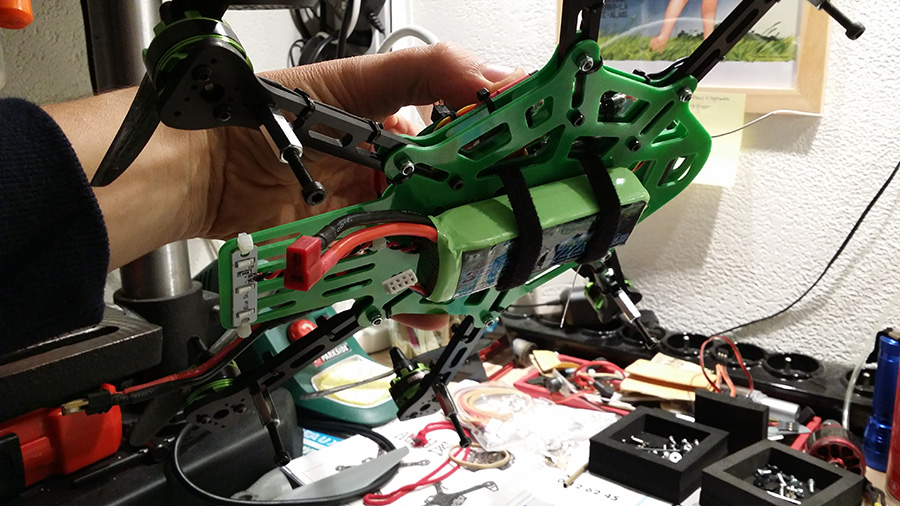
Voici la frame héxa dans son plus simple appareil. C’est tout fibre et ça respire la qualité.
Les bras sont épais et semble plutôt solide

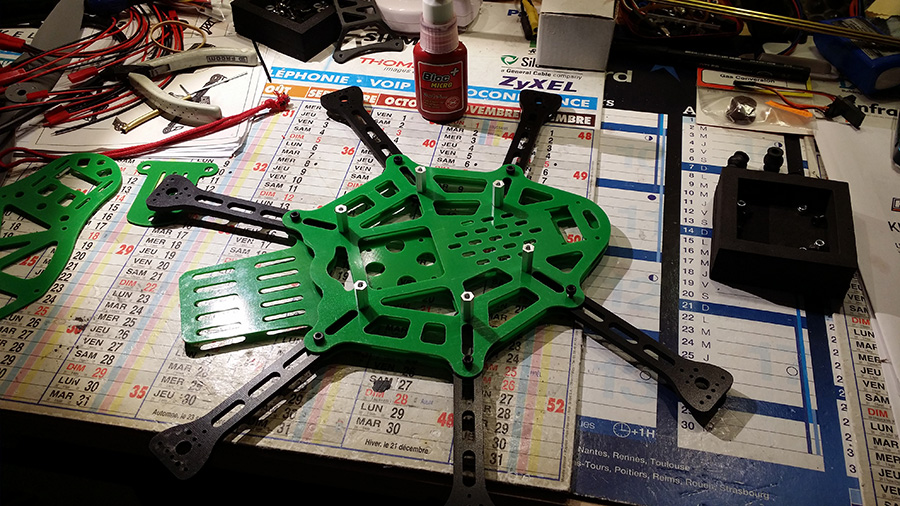
On attaque le montage, en fixant des différentes épaisseurs.
Mettre du frein filet sur toutes les vis, et attention de ne pas trop serrer les colonnettes car j’en ai foiré une (pas terrible).
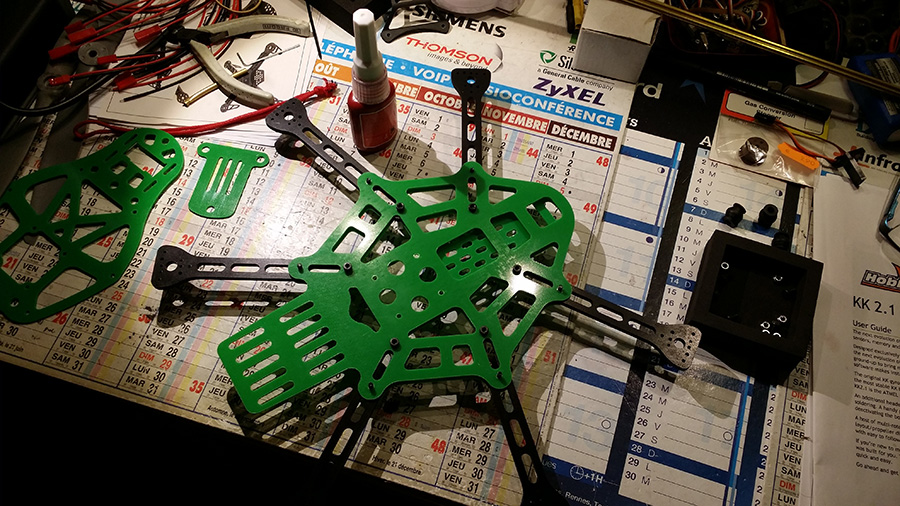
Attention pour le montage des bras, il y a un sens, sinon lorsque vous aller visser les moteurs « Baby Beast » la sortie des fils ne sera pas dans le prolongement des bras.
Ne vous fiez pas à ma photo, car je m’étais trompé, il a donc fallu que je démonte tout à nouveau par la suite.
Pour fixer les moteurs « Baby Beast » il faut agrandir les trous d’origines.

On attaque la fixation des contrôleurs électriques.
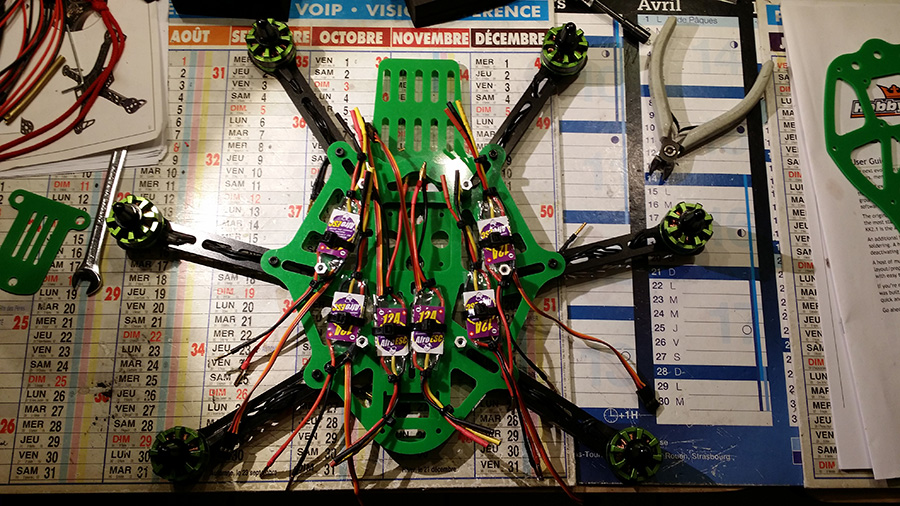
Fabrication de la pieuvre d’alimentation pour connecter toute la filasse 😉
D’un coté je suis en prise Dean (en T) pour la connexion Lipo 3S 2200 mAh, de l’autre j’ai soudé 10 prises JST mâles. (6 pour les contrôleurs électriques, 1 pour la sonde voltage du contrôleur de vol KK, 1 pour la connexion FPV camera et émetteur, 2 pour les LED…)

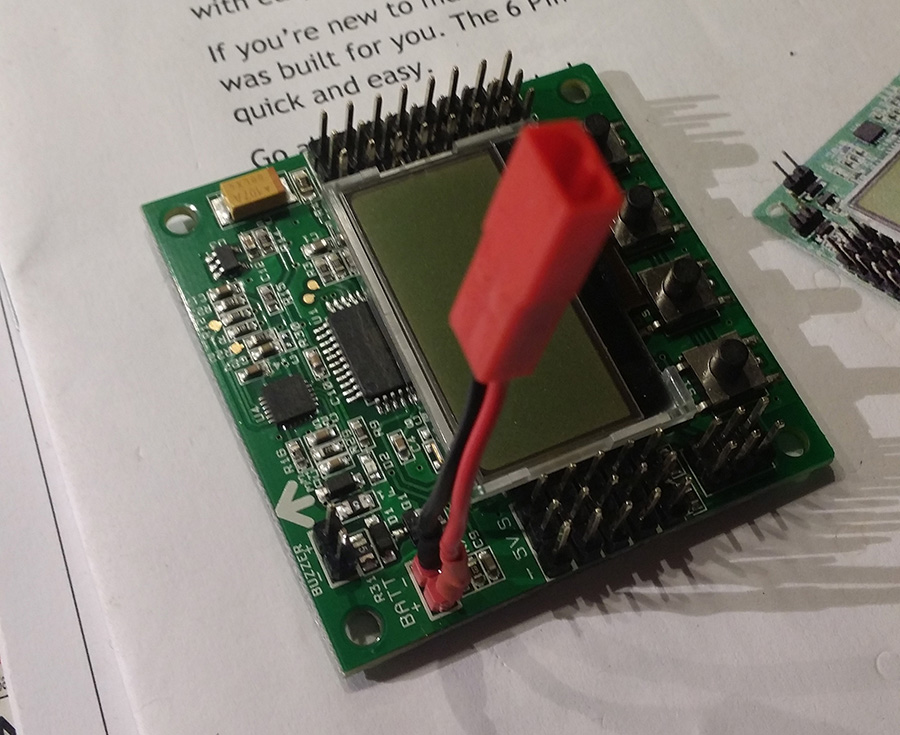
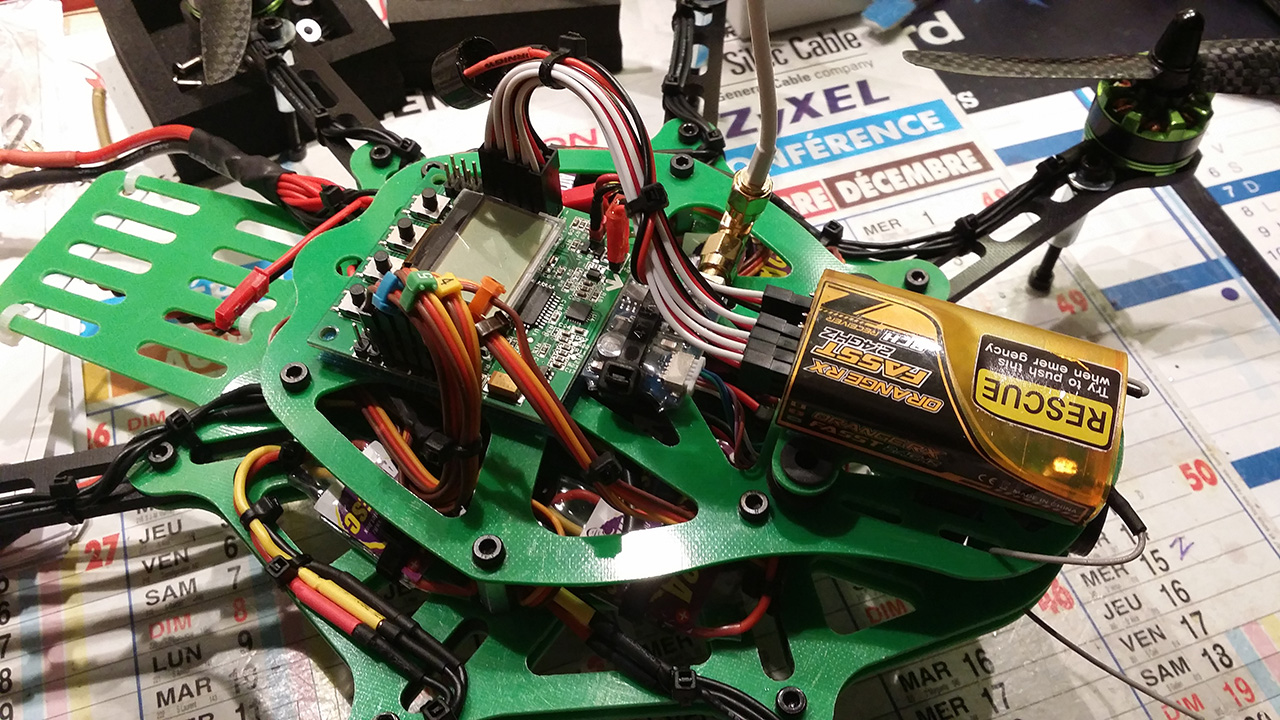
!!! Attention, je profite d’être à ce niveau de l’article pour attirer votre attention sur les branchements électriques sur la carte contrôleur KK.
Vous voyez que j’ai volontairement soudé un connecteur sur la sonde 12v de la carte contrôleur de vol, afin d’éviter de brancher par erreur une connexion 12v sur la prise buzzer située à coté.
Mon copain Nicolas qui suivait mon tuto a fait l’erreur… et PAF odeur de cramé… le contrôleur est mort. Faites attention sur ce point car la prise buzzer aime pas recevoir du 12v… 
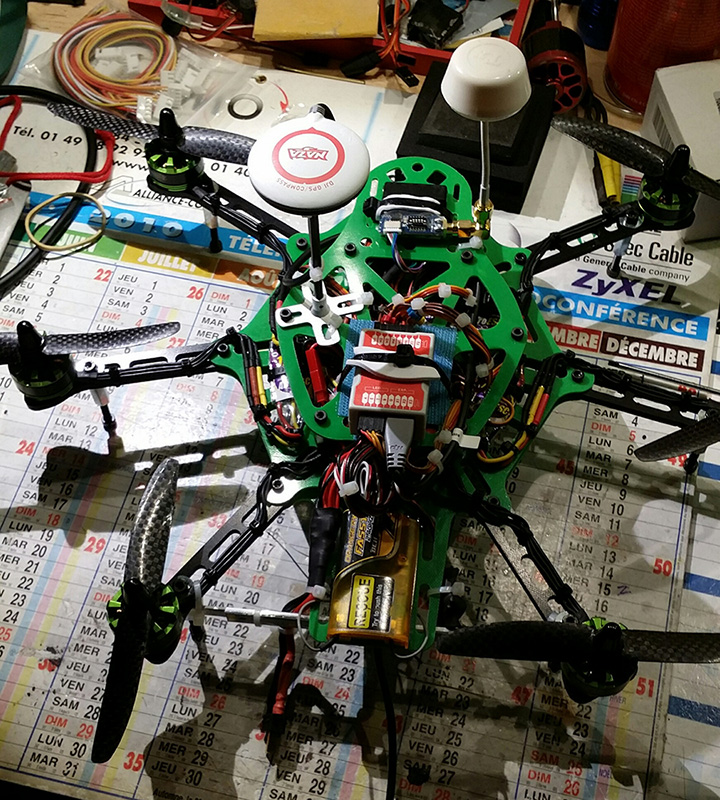
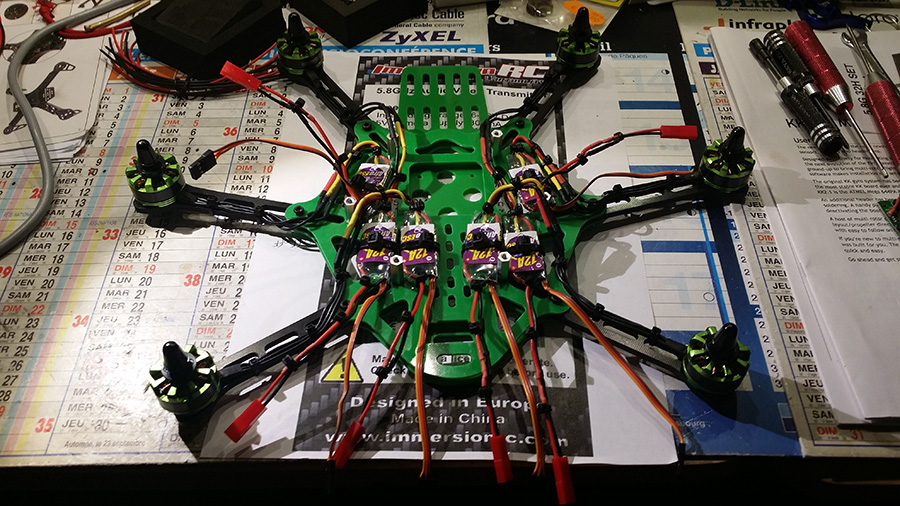
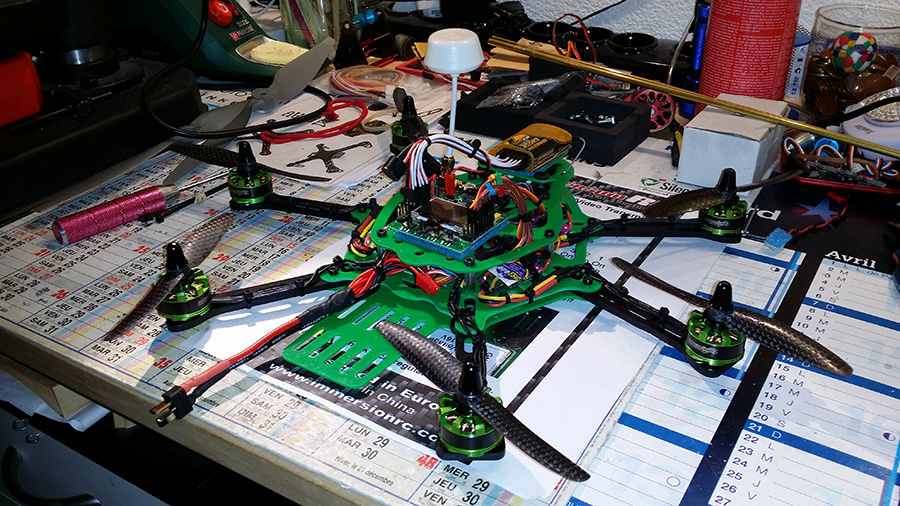
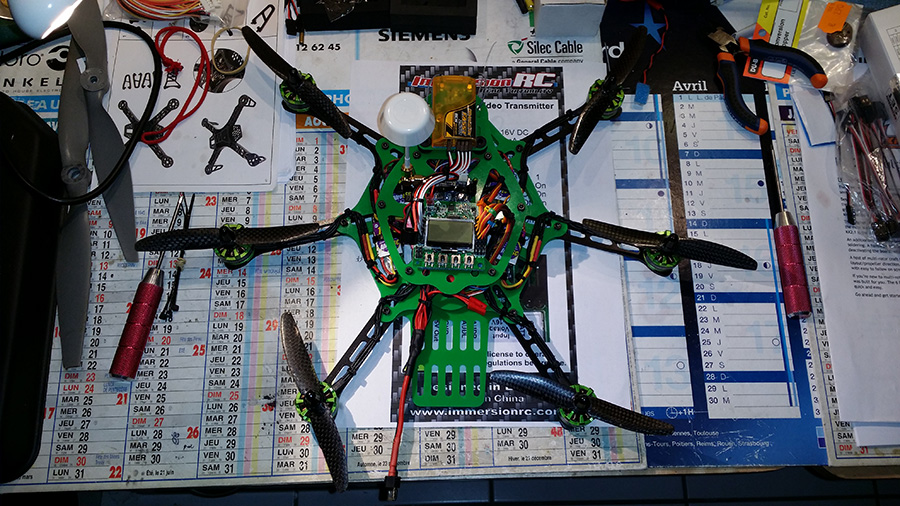
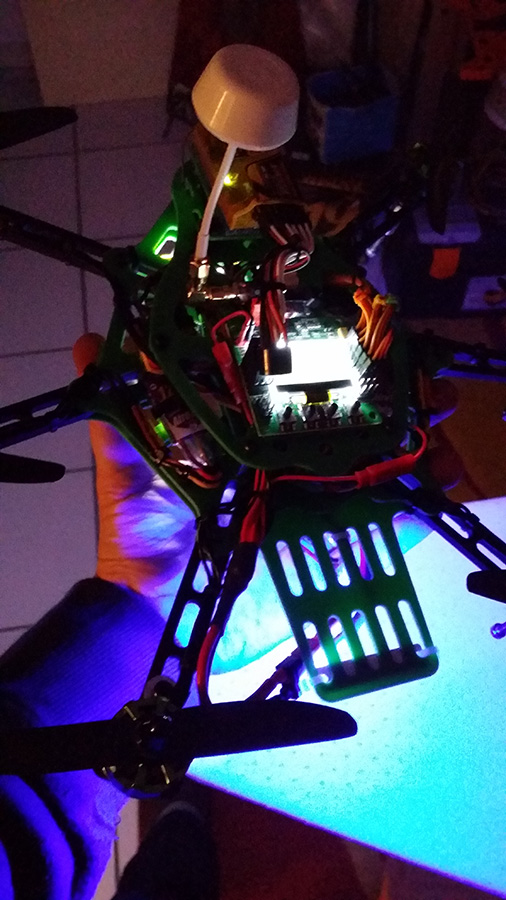
Une fois qu’on a tout rentré au chausse pied, on met la plaque du dessus. Vous voyez que la frame dispose d’un emplacement pour intégrer une caméra FPV (c’est un kit complet, acheté chez Hobbyking pour 75,99 €).



Dans mon cas, sur la photo la caméra FPV est à l’envers (encore une erreur… décidément)
Il faut que la prise blanche soit en dessous.

Au niveau paramétrage du contrôleur de vol KK, on reprend le paramétrage et la méthodologie de l’article du Drone 250.
Il faut juste choisir le Motor Layout HexaCopter x mode, et bien contrôler le sens de rotation des hélices…
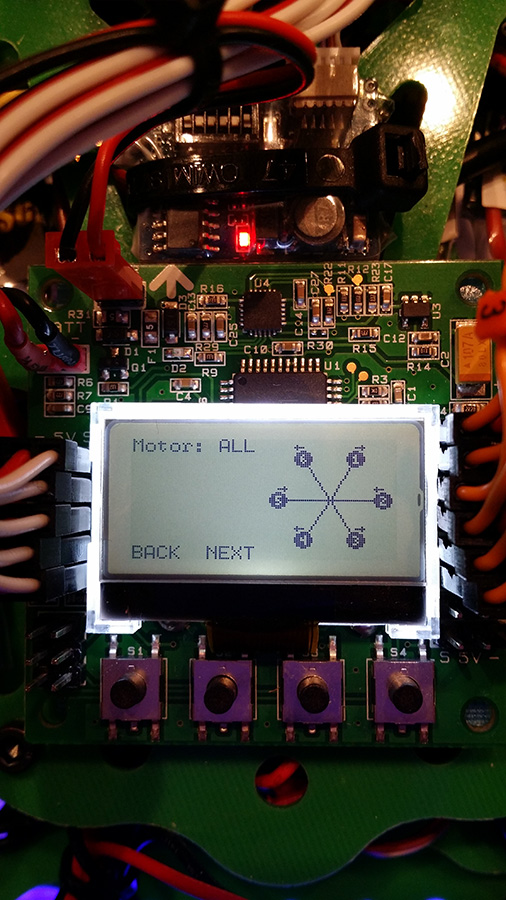
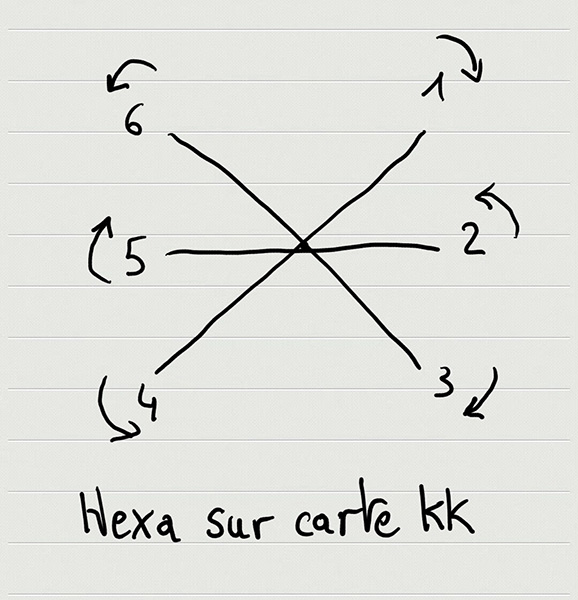
Comme d’habitude, pour changer le sens de rotation d’un moteur, il faut intervertir 2 des 3 fils qui vont du moteur au contrôleur électrique.
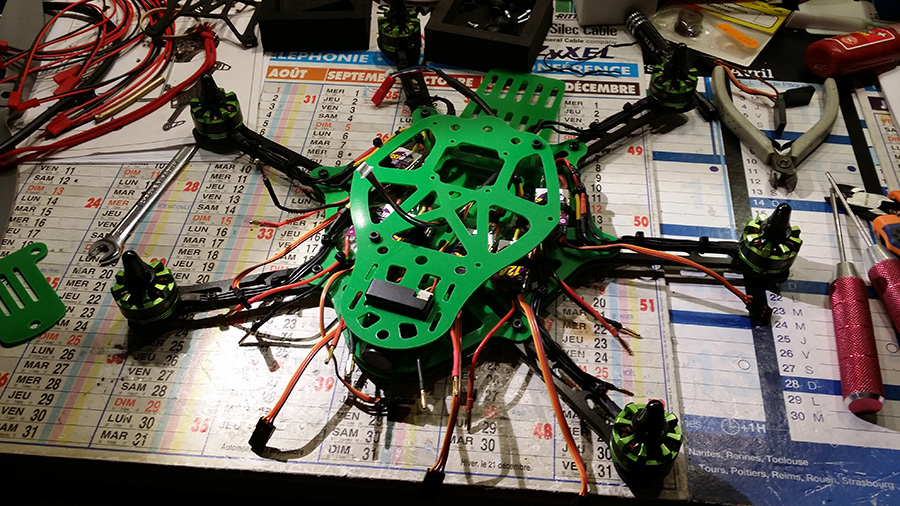
Je manquais de place pour fixer la batterie en respectant un centrage convenable, du coup j’ai fabriqué des pieds avec ce que j’avais sous la main 😉
Le voila fini avec un Led de récupération en attendant mes barres de Led de 3w… (voir prochain article)

Mise à jour du 7 décembre 2014.
Premier vol avec cette configuration samedi dernier…
Le drone est très puissant, très vif… trop vif… Il faut reprendre certains réglages pour adoucir son vol.
J’ai volé avec un minimum de Led puisque j’étais en mode test, du coup la plafond étant très bas ce jour là, après quelques dérives l’emmenant de plus en plus loin, j’ai perdu le drone… puis la réception radio…
Il a volé 2 kms tout seul tranquille et il est tombé dans des jardins ouvriers assez loin du terrain ou je vole. Je l’ai récupéré grâce à un coup de chance et à l’honnêteté du gardien des jardins (Que je remercie vivement  ).
).
Bilan 4 hélices carbones HS, et une lipo 3S. Mais je m’en sort bien 😉
Du coup j’ai changé le contrôleur de vol pour passer sur un modèle NAZA Lite + GPS acheté d’occasion sur leboncoin (95 euros).
Ca sera plus rassurant avec le mode RTH (return to home) : pour ceux qui connaissent pas, grâce au GPS, le drone revient ce poser tout seul à l’endroit ou il a décollé…
Alors attention si vous optez pour ce choix, il va falloir inverser le sens de rotation de tous les moteurs (en changeant le branchement de 2 fils par moteur) et intervertir les hélices également.
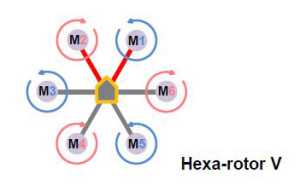
Si vous comparez le schéma ci-dessus (NAZA) par rapport à mon précédent schéma (KK), vous pouvez voir que le sens de rotation des moteurs a changé.
J’ai également installé des Leds 3W très puissant voir aveuglant 😉 qui permette de voir le drone dans toutes les circonstances. (C’est ici chez Hobbyking)
Question consommation, j’ai fais quelques test en branchant le Led blanc 3w sur une lipo 3S 1300 mAh jusqu’à atteindre 3.5v par cellule (valeur de décharge importante d’une lipo).
Il faut 55 minutes pour vider la lipo 3S 1300 mAh…

Voila donc la nouvelle version de la bête 😉