Le 01/11/14 :
Après 14 semaines d’attente, je viens de recevoir des photos de mon F-15 en provenance de l’usine Skymaster chinoise. Mon F-15 est prêt il part pour la France 
J’aime bien les arrières plans de l’usine avec les gars qui travaillent, et les avions partout…
Je démarre donc l’article sur son montage. Les photos vont arriver au fil de l’eau…
Le 05/11/14 :
Expédié de chine le samedi et livré chez moi le mercredi après un paiement de la douane (166 euros)… Je m’en sort pas mal.
Au programme déballage, et montage à blanc pour les photos et pour cerner la bête 😉
Le 08/11/14 :
Montage du cockpit »maquette » dans la bulle. Une vraie galère à couper.
Peinture à reprendre dans le cockpit car fait à l’arrache par un chinois apprenti…
Ca tranche avec le qualité du reste de l’avion. Mais bon ça le fera quand même.



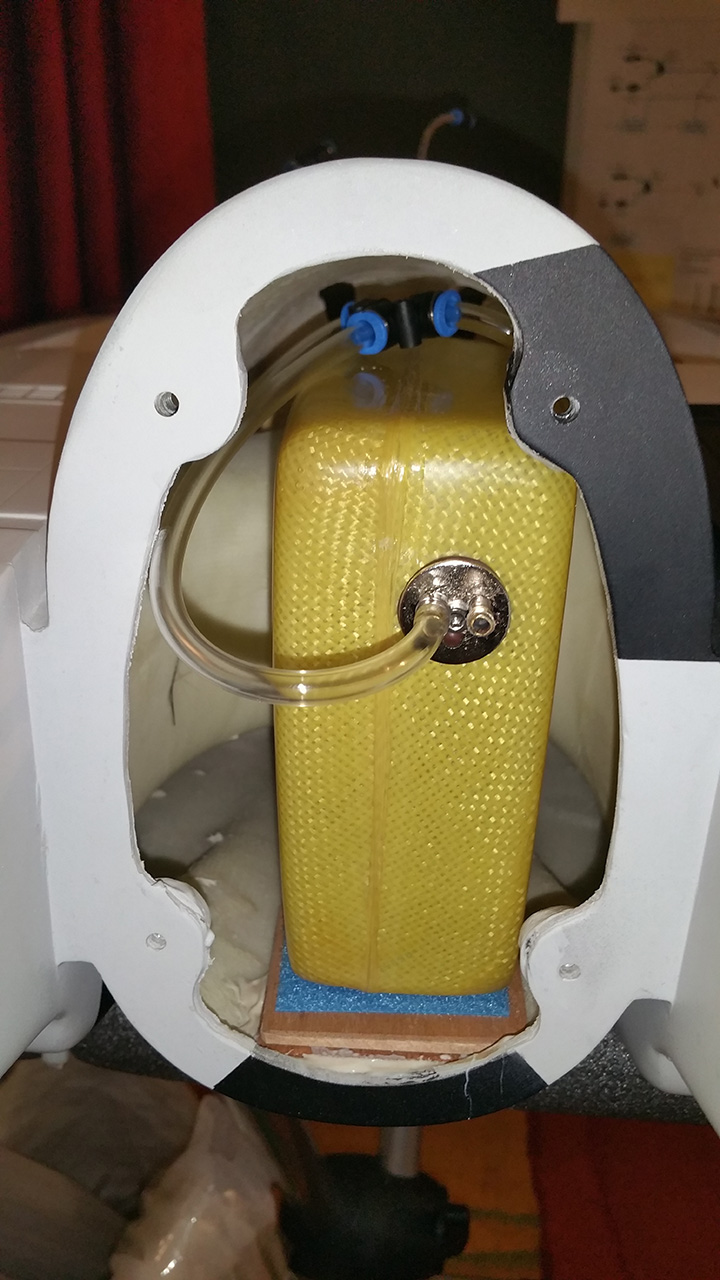
J’ai attaqué également le montage du réservoir central en kevlar, mise en place du bouchon, du plongeur avec la tygon.
Le 21/12/14 : Grosse coupure dans le montage du F-15 car j’avais mes drones à monter.
Les vacances de Noël aidant je me remet au montage du Jet 😉
Après les bons conseils de Willy, je reprend complètement le montage des plongeurs dans les réservoirs kéro…
Du coup il a fallu que je me mette à la plomberie. Achat d’un chalumeau, de brasure à l’argent, et de ressorts pour cintrer les tuyaux en laiton.


Après quelques essais pour maitriser le chalumeau et la soudure, je découpe des bagues dans une section supérieure à celle des tubes laiton du réservoir. Une fois soudées les bagues empêcheront la durite Tygon de glisser.

A l’aide d’un ressort du diamètre permettant de glisser à l’intérieur le tuyau en laiton, je cintre le tuyau en chauffant à rouge l’ensemble au chalumeau, ensuite j’enlève le ressort.
Ceci permet d’éviter d’écraser le tuyau et de faire des pliures aux courbures.
Je sécurise l’ensemble avec du fil à freiner et c’est terminé. Il va falloir faire ca pour les autres réservoirs kéro.


le 15/03/2015 :
Bon, il faut attaquer sérieusement le montage du F-15 si je veux voler avec cet été…
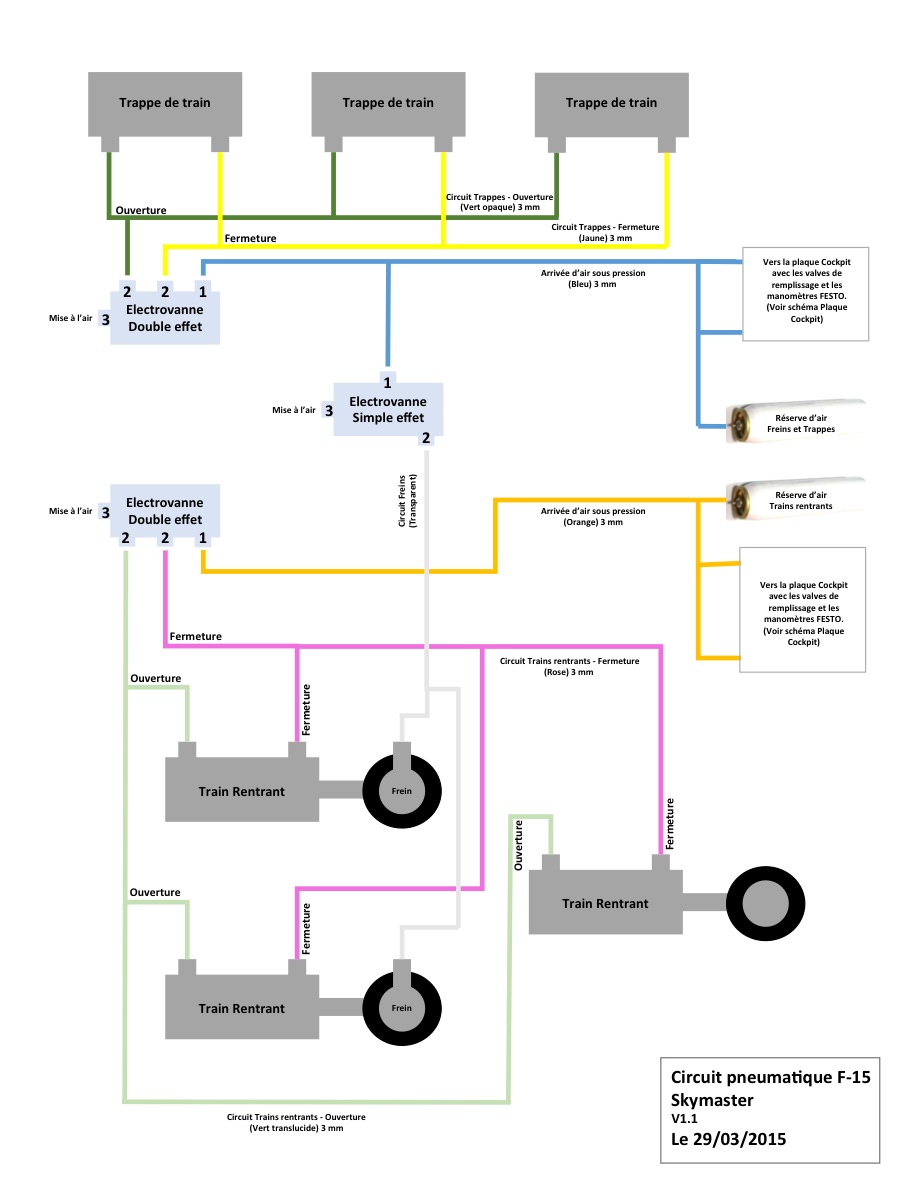
J’entreprend de démarrer par le circuit pneumatique déjà avancé par Skymaster.
Avant toute chose, un bon schéma pour éviter les erreurs.


Le 22/03/15 :
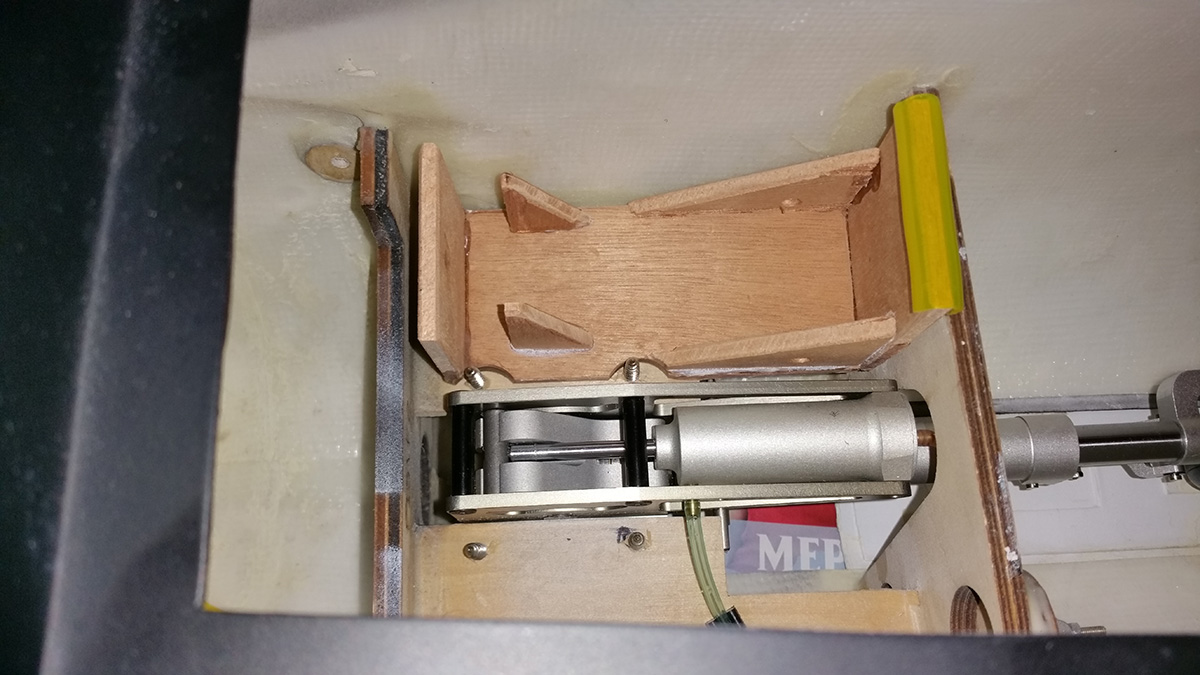
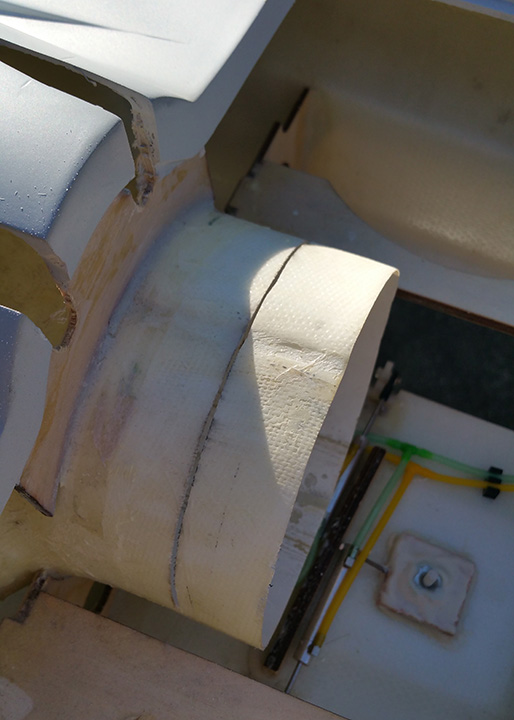
Avant de mettre en place le réacteur et le matériel pneumatique, il va falloir percer le fuselage pour fixer le faux réservoir central de l’ordinance kit du F-15

Montage à blanc pour la prise des cotes.

Je vais modifier la fixation afin de rendre le bidon démontable car j’ai des doutes sur la hauteur quand je vais décoller de ma piste en herbe… Un petit trou de 3 mm pour fixer le bidon sur le support avec des vis plastiques (pour favoriser l’arrachage si j’accroche le gazon à l’atterrissage).


Faut fixer le tout sur la cellule. C’est maintenant qu’il faut percer droit car j’ai pas envie d’avoir le faux réservoir de travers quand je vole 😉

Il reste à coller des renforts en contreplaqué et installer les écrous griffes. J’ai choisi d’utiliser une colle aéropoxy pour tous les collages du F-15. A la différence de la colle epoxy classique, cette colle conserve des propriétés souples au séchage.


On laisse sécher 24 heures et voila c’est fini

Le 28/03/2015 :
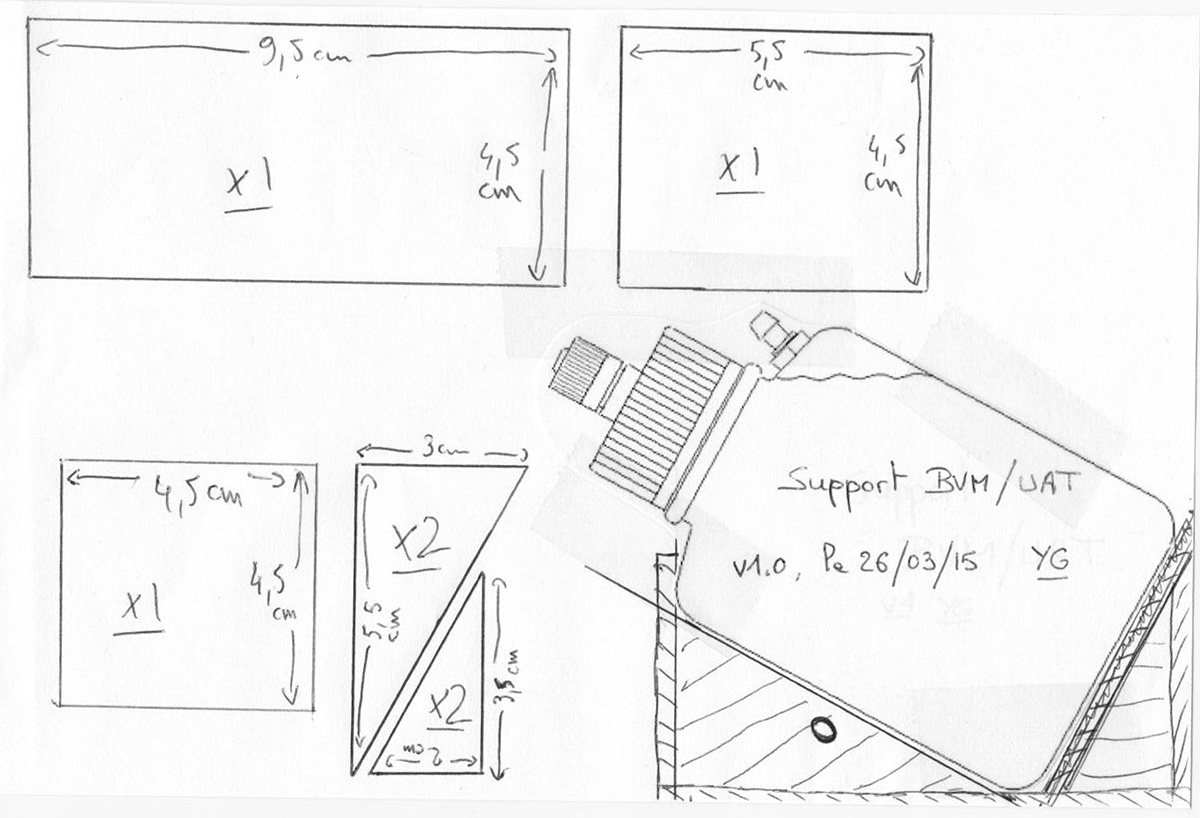
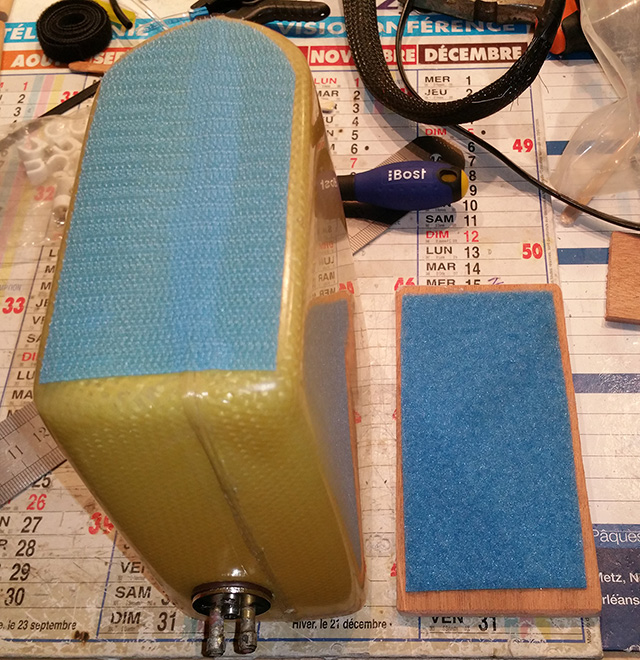
En attendant ma commande de matériel Festo, et ma dernière électrovanne double effet Jet-tronics, j’entreprend de monter le support du réservoir tampon dans le F-15. Avant toute chose, un petit plan pour ne pas partir en improvisation.
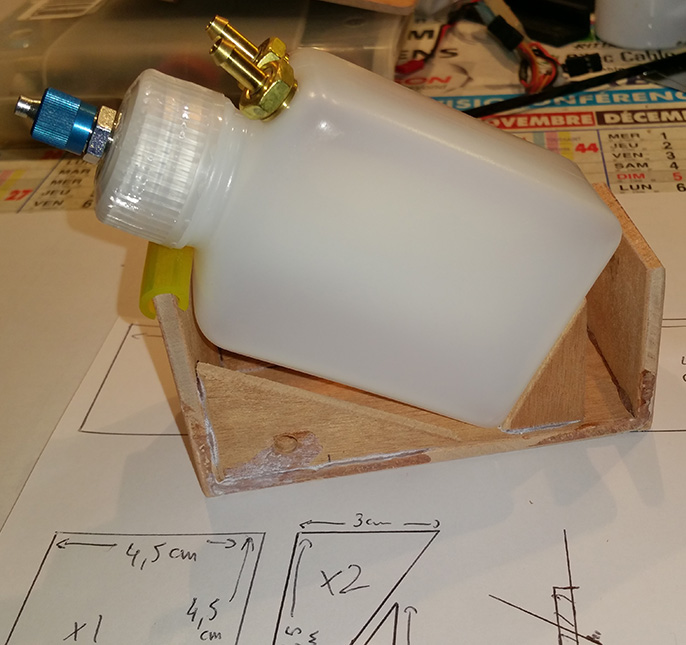
 Quelques découpes de contreplaqué plus tard, j’ai enfin ma pièce.
Quelques découpes de contreplaqué plus tard, j’ai enfin ma pièce.



21 grammes de bois. Ca va j’ai contenu la prise de poids 😉
Le 04/04/15 :
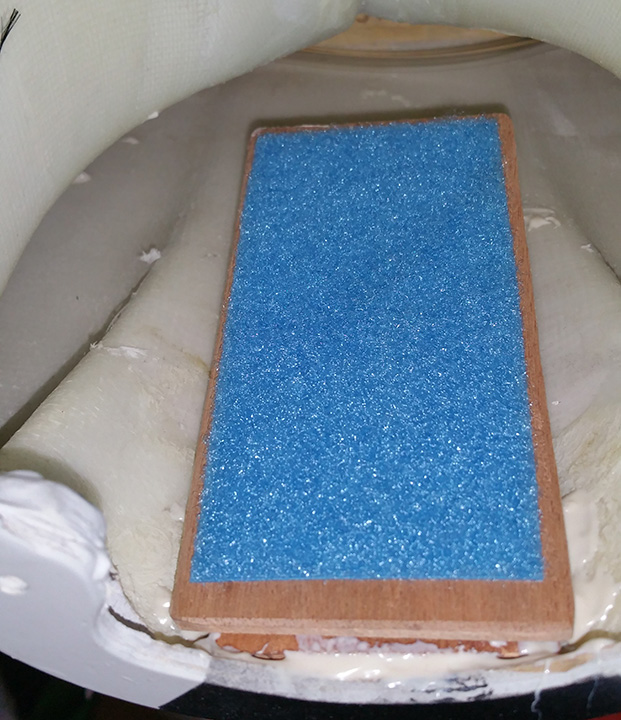
Je vais attaquer la préparation et le collage des différents supports (réservoir central, platine cockpit).
Collage du support réservoir central. Il manque la plaque qui est en préparation…



Collage des supports de la platine cockpit



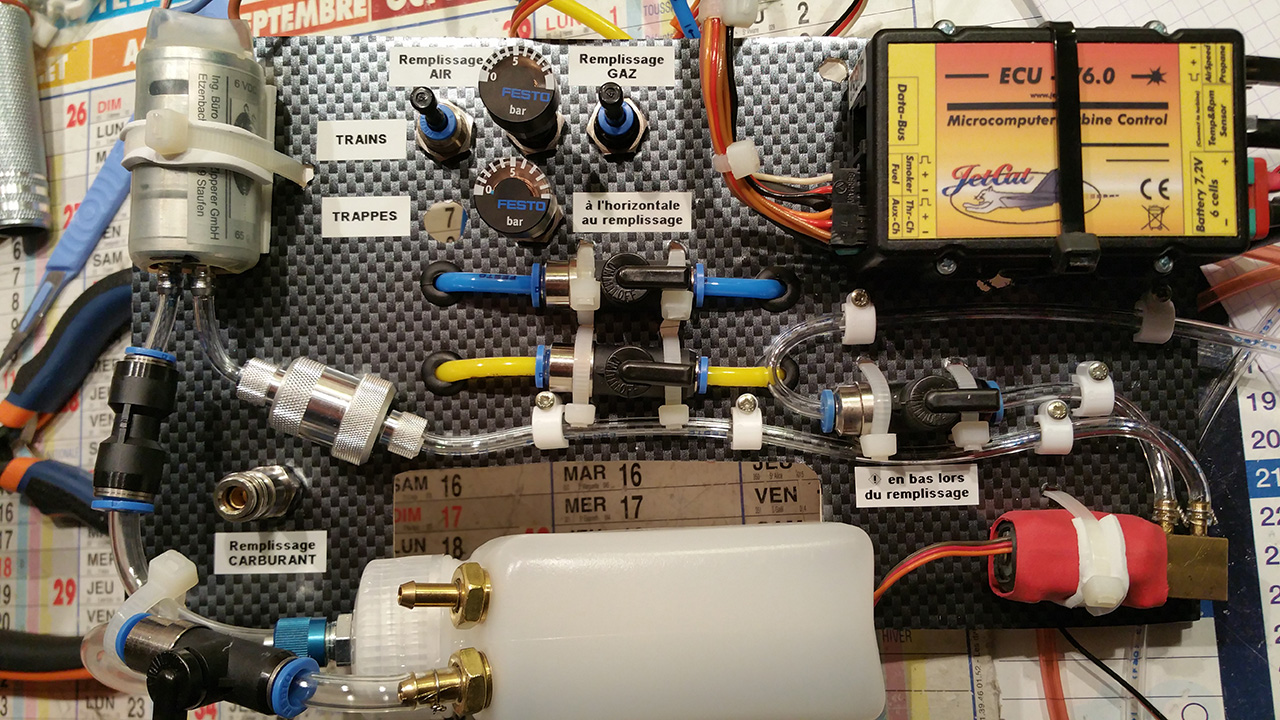
Maintenant il faut bien réfléchir à l’emplacement des éléments sur la platine radio. Après quelques jours de faire et refaire je m’arrête sur le plan (pour l’instant définitif).
 J’ai lu tout ce que je pouvais dans les documentations JetCat. Il en ressort qui faut éloigner le récepteur de l’ECU et de la pompe Kero. (Même si je suis pas convaincu que ça perturbe mon récepteur 2.4 Ghz…).
J’ai lu tout ce que je pouvais dans les documentations JetCat. Il en ressort qui faut éloigner le récepteur de l’ECU et de la pompe Kero. (Même si je suis pas convaincu que ça perturbe mon récepteur 2.4 Ghz…).
Du coup le récepteur ira ailleurs car c’est déjà bien serré sur la platine.
Egalement, il est indiqué que le tuyau entre le réservoir tampon et l’entrée de la pompe Kero doit être le plus court possible.
Vous voyez sur le plan, que j’ai prévu deux vannes Festo de 4 pour fermer le circuit d’air d’entrée et de contrôle pression par les manomètres. Ca évitera les fuites d’air par ce biais en vol. (Toujours une sécurité de plus).
Je trace les différents éléments pour avoir une idée précise et on attaque le perçage.

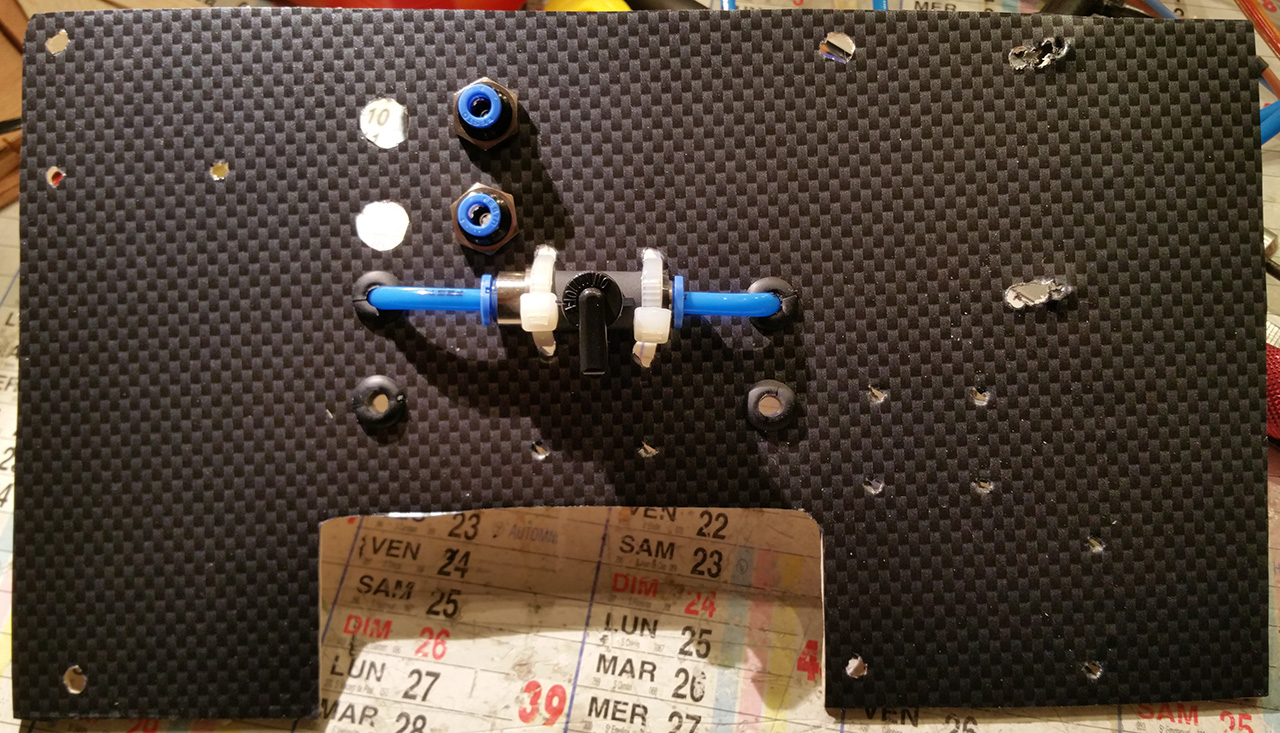
Maintenant j’utilise un film imitation carbone plutot que de la peinture afin d’avoir un meilleur rendu.

Après de nombreuses heures et quelques modifications du plan, j’obtiens le résultat que j’attendais

J’ai finalement monté le remplissage Gaz en haut, et la valve de remplissage carburant en bas à gauche. Il me manque une valve auto obturante pour les trappes. (elle sera installée plus tard).
Le 07/04/2015 :
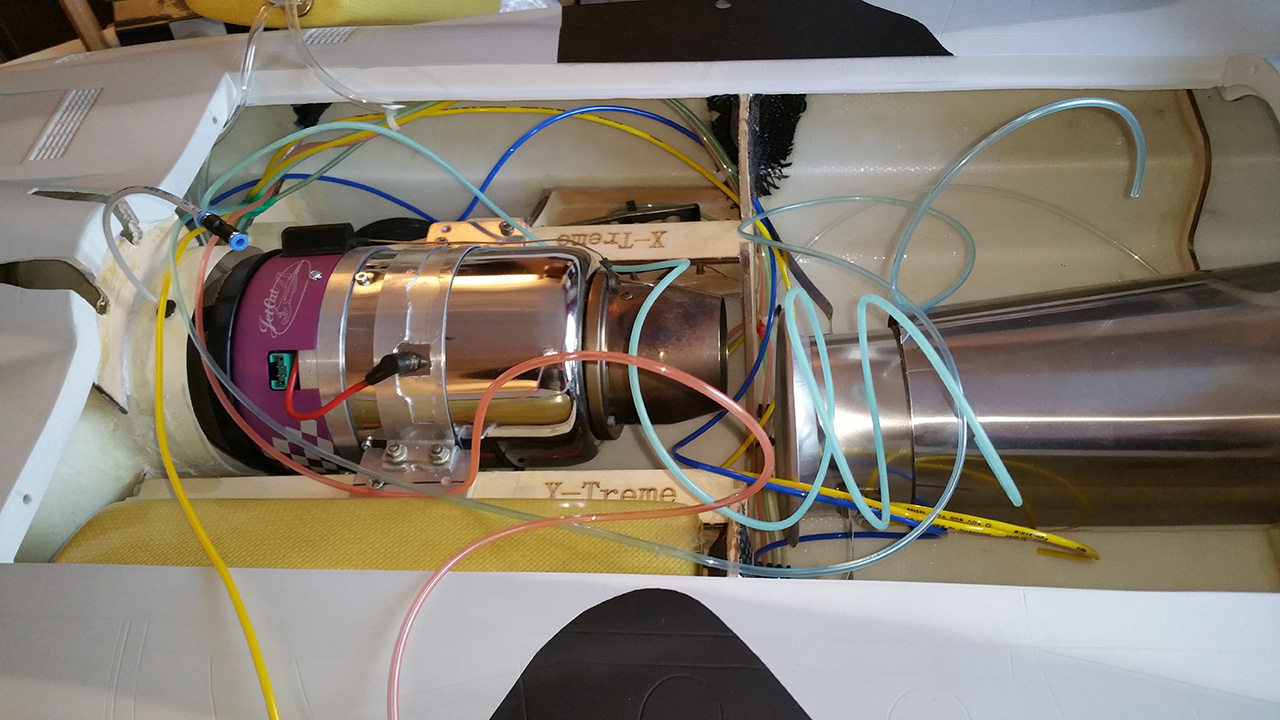
Je vais entreprendre le montage du réacteur et des réservoirs afin de pouvoir positionner les tuyaux de carburant et de gaz.
Pour placer la JetCat P120SE sur le centre de gravité je vais réduire le conduit d’arrivée d’air qui prend trop de place et qui me gène pour positionner le réacteur par rapport à la tuyère.


Un coup de DREMEL plus tard j’ai enfin de la place pour positionner mon réacteur.
Je positionne le trop plein pendant que j’y suis.


J’ai fais le choix d’utiliser un passe cloison de diamètre 6 FESTO afin de pouvoir utiliser un réservoir de taxage ultérieurement sur le terrain. (J’aurais plus qu’à le connecter sur la prise de trop plein avec un tuyau de 6 quand j’aurais envie…).
Le 10/04/2015 :
Je passe au montage du circuit pneumatique. Pour ce faire il va falloir monter définitivement la partie avant du F-15. Je finalise la fixation du réservoir frontal et je fixe la partie avant au corps de l’avion. 4 BTR M4 et 2 BTR M3 (latérales) sécurisées au frein filet pour fixer l’ensemble.


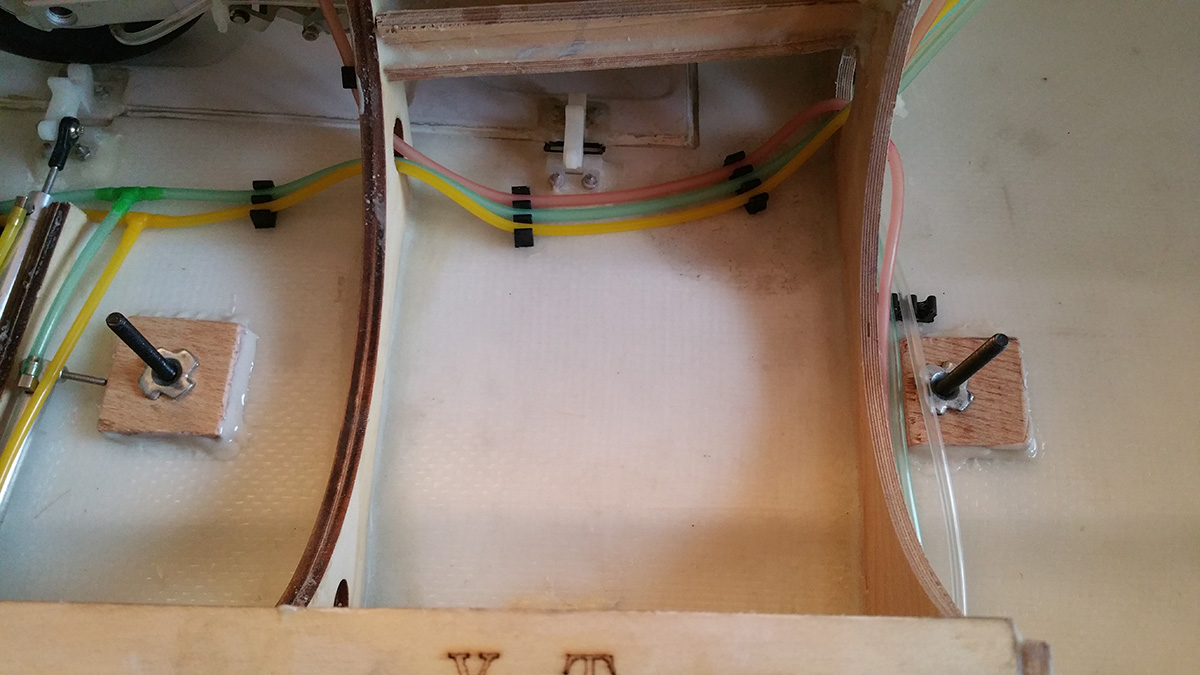
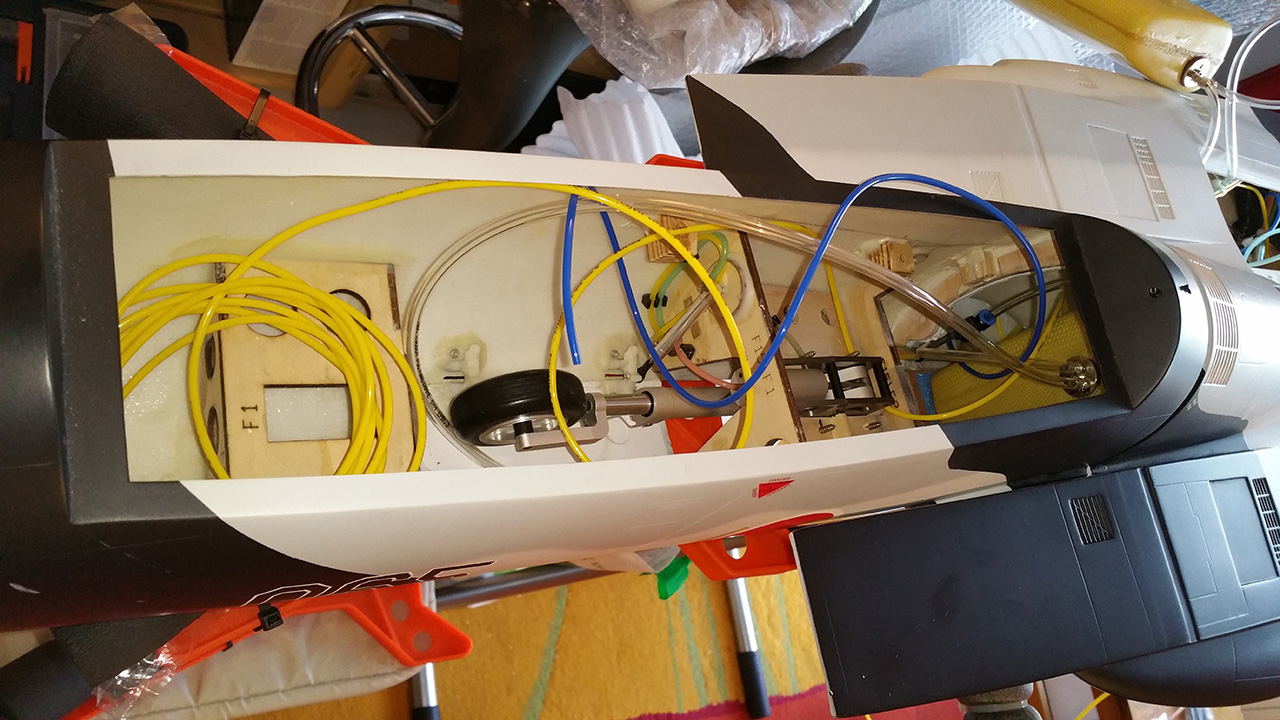
On démarre le gros bordel des tuyaux partout dans l’avion 😉


Faut ranger tout ça au propre en triant et en accrochant l’ensemble sur des fixations destinées à recevoir des colliers plastiques.

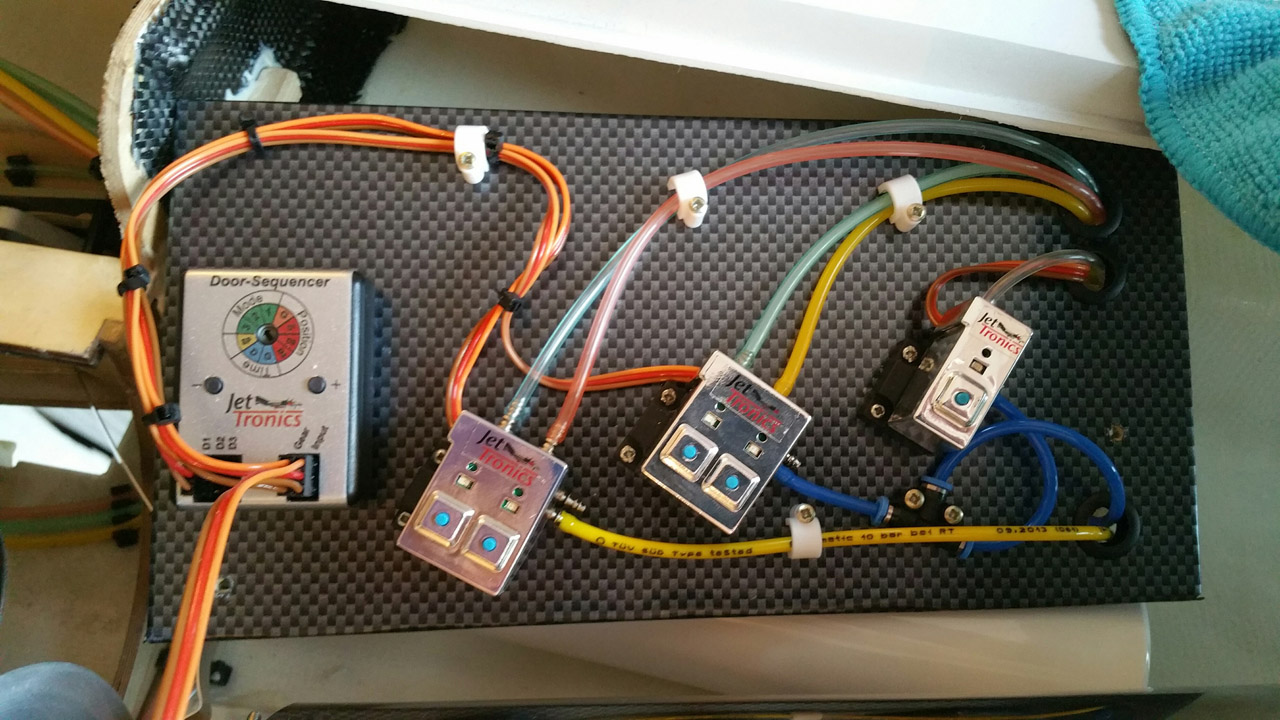
Je prépare maintenant le support destiné à recevoir les 3 électrovannes.

Le 14/04/2015 :

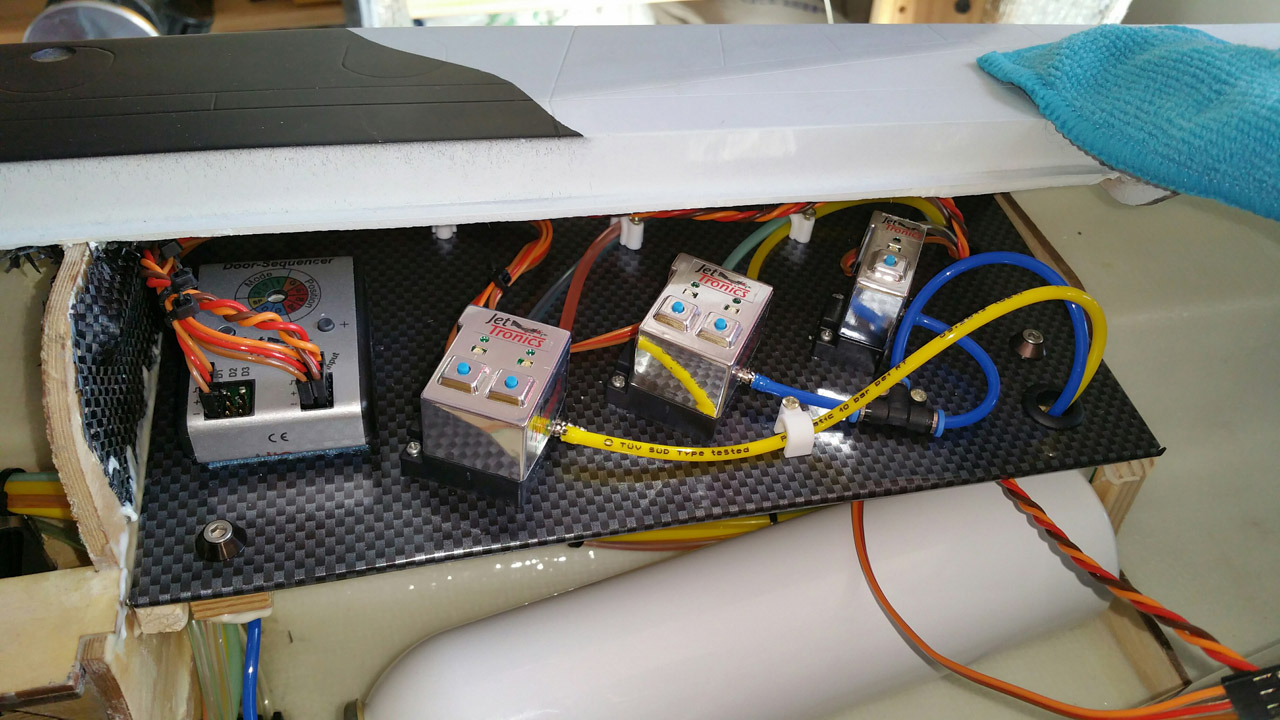
Montage à blanc pour étudier l’emplacement des électrovannes et du séquenceur

Je pose le film imitation carbone et c’est bon pour le montage 😉

Fixation définitive et mise en place du faisceau pneumatique sur les supports collés précédemment. Il reste à coller les réserves d’air au fond de l’avion avec du silicone.


C’est fini pour la partie pneumatique. Je vais attaquer maintenant l’électronique.
Pour l’instant je fabrique toutes les rallonges servos afin de mettre en place le faisceau électrique dans les chaussettes de protection.
Le 16/04/2015 :
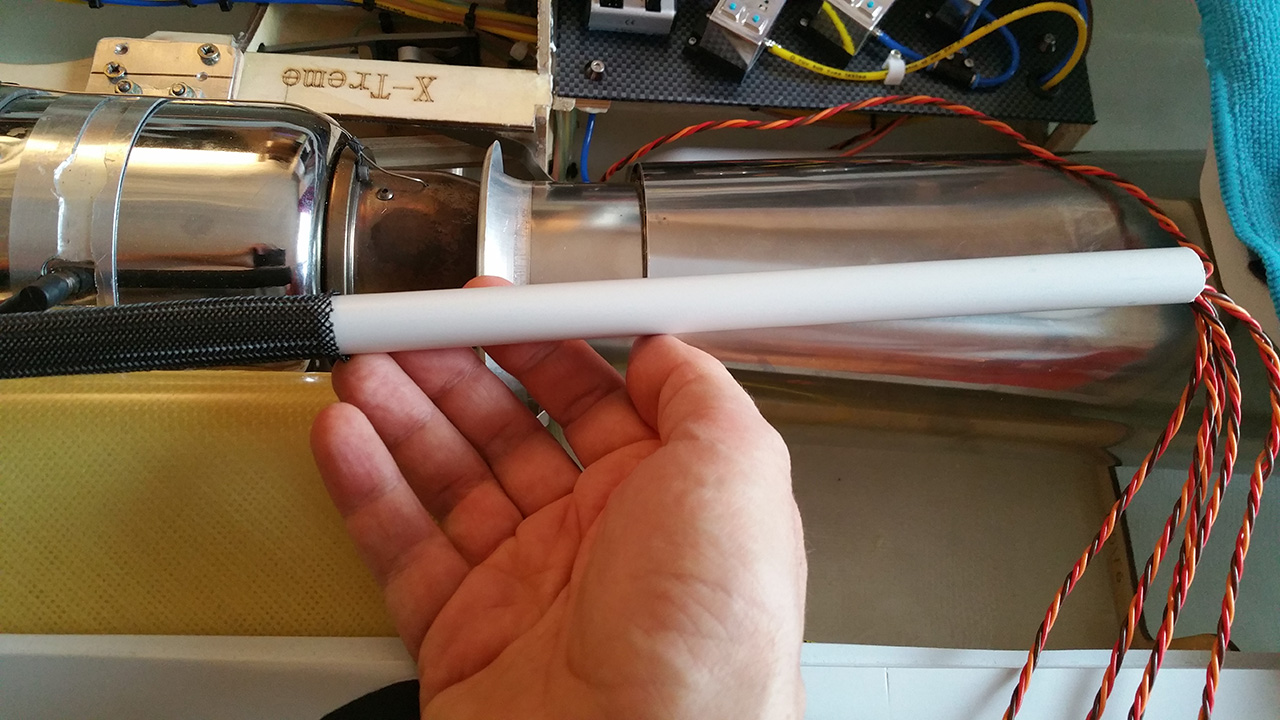
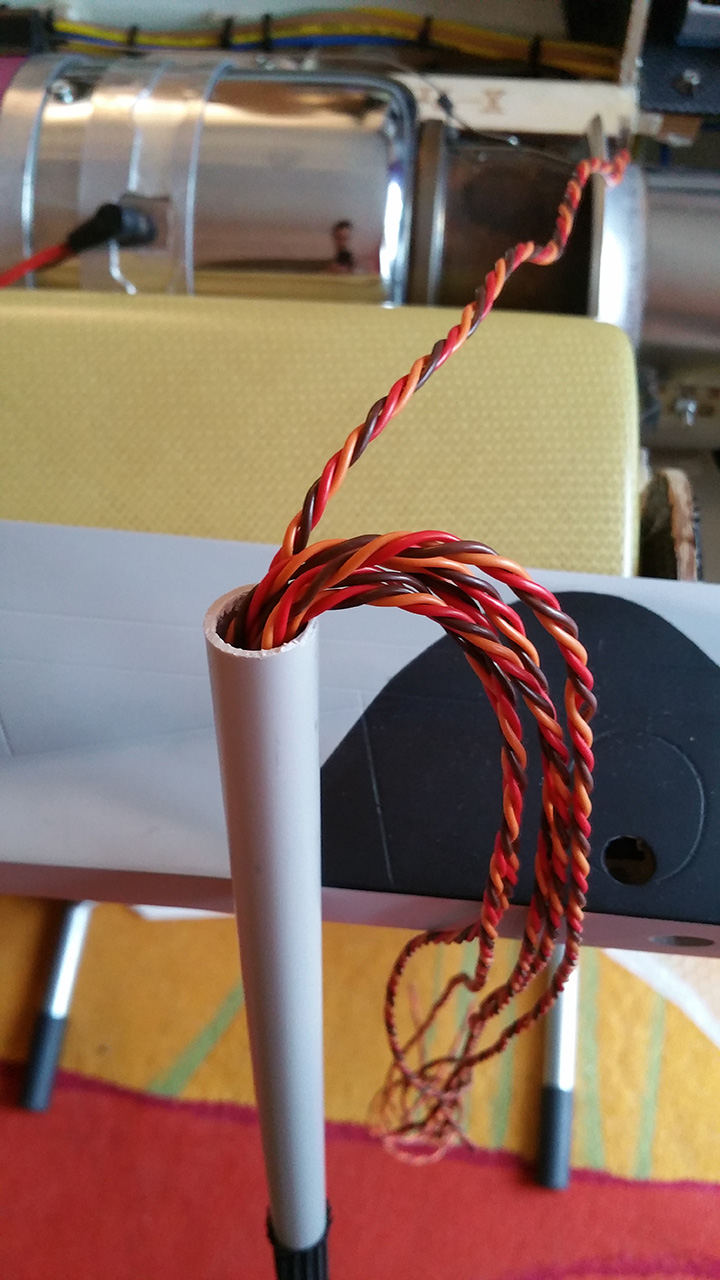
J’étais inquiet de savoir comment passer mon faisceau électrique dans les chaussettes de protection car la dernière fois ça avait été une vraie galère…
J’ai fini par trouver une combine toute con. Je met la chaussette sur un tube PVC du diamètre qui m’intéresse. Je passe mes fils dans le tube, ensuite je maintiens d’un coté les fils et la chaussette et je retire le tube 😉
C’est con comme tout et ça fonctionne d’enfer



Et mine de rien je viens de finir le faisceau électrique droit du F-15 avec les 6 rallonges servos passées dans la chaussette.
(Profondeur droite, Dérive droite, aileron droit, volet droit, trains rentrant, freins).

Le 22/04/2015 :
Il faut que je commence le montage des servos dans l’avion afin de réaliser au plus juste les faisceaux électriques.
Je commence par monter les stabilisateurs qui vont avoir les servos les plus éloignés dans l’avion. Grosse surprise il fallait bien que ça arrive dans le montage… Je découvre un problème majeur de fabrication… La qualité chinoise 
Les axes sont collés dans les stabilisateurs, mais pas à la bonne longueur, ils dépassent beaucoup trop et ne permettront pas d’installer les caches tuyères.
Rien ne va, le trou d’origine est du coup trop éloigné et ne permettra pas de sécuriser l’axe avec la clavette. le met plat n’est pas dans l’axe et surtout n’est pas au même endroit sur les 2 axes. Ca va provoquer des neutres différents entre les 2 servos de profondeurs.
C’est pas facile à expliquer par écrit mais en gros c’est la merde…





Sur cette photo on voit mieux le décalage…
Il va falloir retravailler tout ce montage pourri… Vraiment pas cool pour un avion qui jusqu’à présent était correct au niveau de la qualité et du pré-montage.
Je réduis la longueur des axes et perce un nouveau trou pour ajuster les clavettes.




J’ai fait un plat avec la Dremel pour donner de l’angle à la fixation et récupérer le décalage. Je réfléchis à visser une BTR M2 dans l’axe pour être sur que la fixation Alu ne glisse pas sur son axe en vol. (à voir plus tard)
En parallèle je viens de recevoir une commande complémentaire pour l’avion. J’ai choisi d’utiliser un accastillage de qualité afin de ne pas utiliser ce qui est fourni avec l’avion.
Je remplace les commandes de servos d’origines et les chapes à boules en plastique par de matériel plus haut de gamme. Du coup j’ai passé commande de tiges en titane M3 de différentes longueurs, de chapes à boule M3 en alu, et de chapes en métal.

J’en ai aussi profité pour commander mon kit After Burner chez XICOY.

Le 25/04/15 :
J’aurais bien galèré avec la construction approximative de Skymaster sur la profondeur. J’ai enfin fini je vais pouvoir avancer sur le reste.
Ci-dessous, les commandes de profondeur du F-15, tout en inox, titane, alu et sécurisation au frein filet. Vous l’avez compris, j’aime pas le plastique… 😉




Le 28/04/2015 :
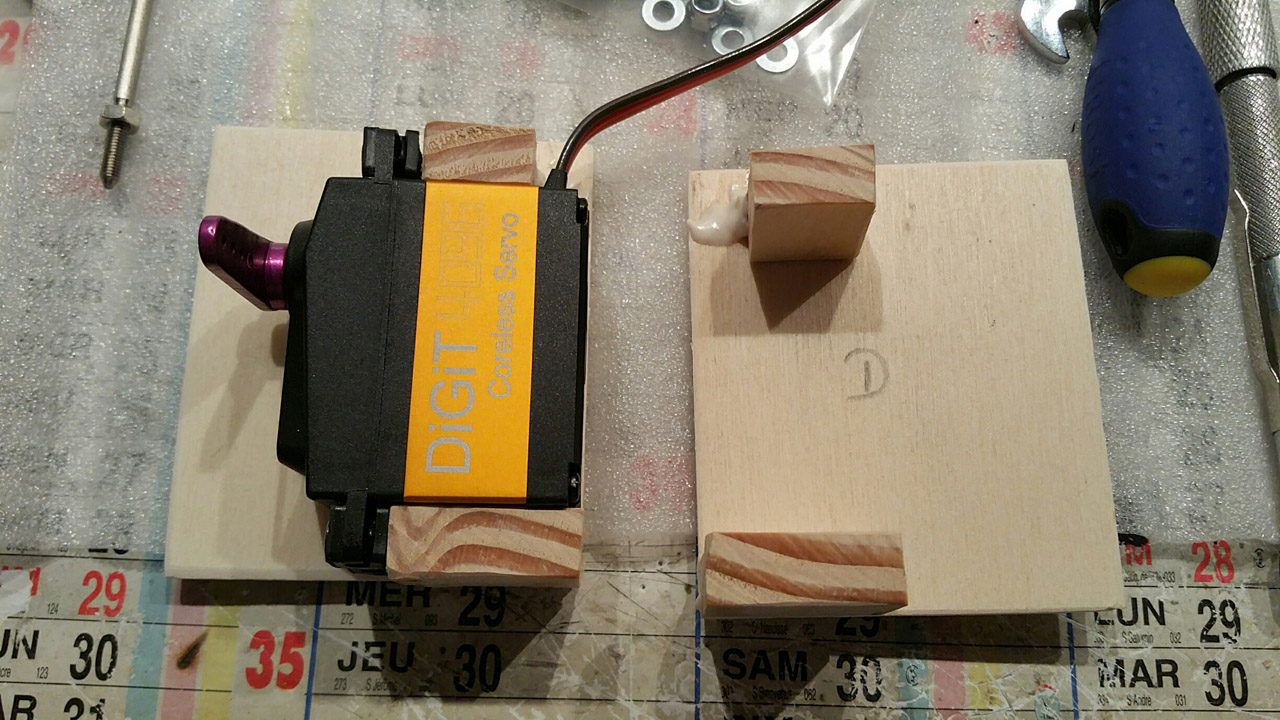
Je vais mettre en place les servos dans l’avion. J’ai choisi de fixer les servos sur des plaques que je vais ensuite visser dans l’avion. Je trouve ca, plus pratique pour moi.
Il va falloir couper des petites plaques et des supports pour les servos. J’ai investi dans une scie circulaire Proxxon KS 230 afin d’aller plus vite et de travailler proprement. De toute façon quand on bricole des avions en modélisme c’est presque obligatoire d’avoir ce genre d’outils et une Dremel 😉

La découpe et le perçage des supports effectué, je démarre la fabrication des supports destinés à être vissés dans les ailes, volets, dérives et la profondeur.


Le 01/05/2015 :
Ca y est j’ai tout pour finir la profondeur. Montage final des servos, réglage mécanique au millimètre et sécurisation de l’ensemble au frein filet.



Actuellement le montage du F-15 est en pause car je viens de finir le remontage d’un Wild Hornet de Jet Arrows équipé du réacteur Merlin M100X que j’ai acheté entretemps.
Et comme il fait beau en ce moment, je vole 😉
La suite à venir…